
基于CAN通讯的矿用自卸车控制系统及装置.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CAN通讯的矿用自卸车控制系统及装置.docx
基于CAN通讯的矿用自卸车控制系统及装置标题:基于CAN通信的矿用自卸车控制系统及装置摘要:随着矿业的发展,矿用自卸车在矿山运输中起着至关重要的作用。为了提高自卸车的安全性、可靠性和效率,本文提出了一种基于CAN通信的矿用自卸车控制系统及装置。该系统利用CAN通信技术实现了各个控制单元之间的高效通信和协同工作,同时采用安全保护机制确保系统的可靠性和安全性。实验结果表明,该系统在提高自卸车控制的精度和稳定性方面具有显著的优势。关键词:CAN通信,矿用自卸车,控制系统,装置,安全性引言:矿用自卸车是矿山运输中
矿用自卸车轮毂总成装置及矿用自卸车.pdf
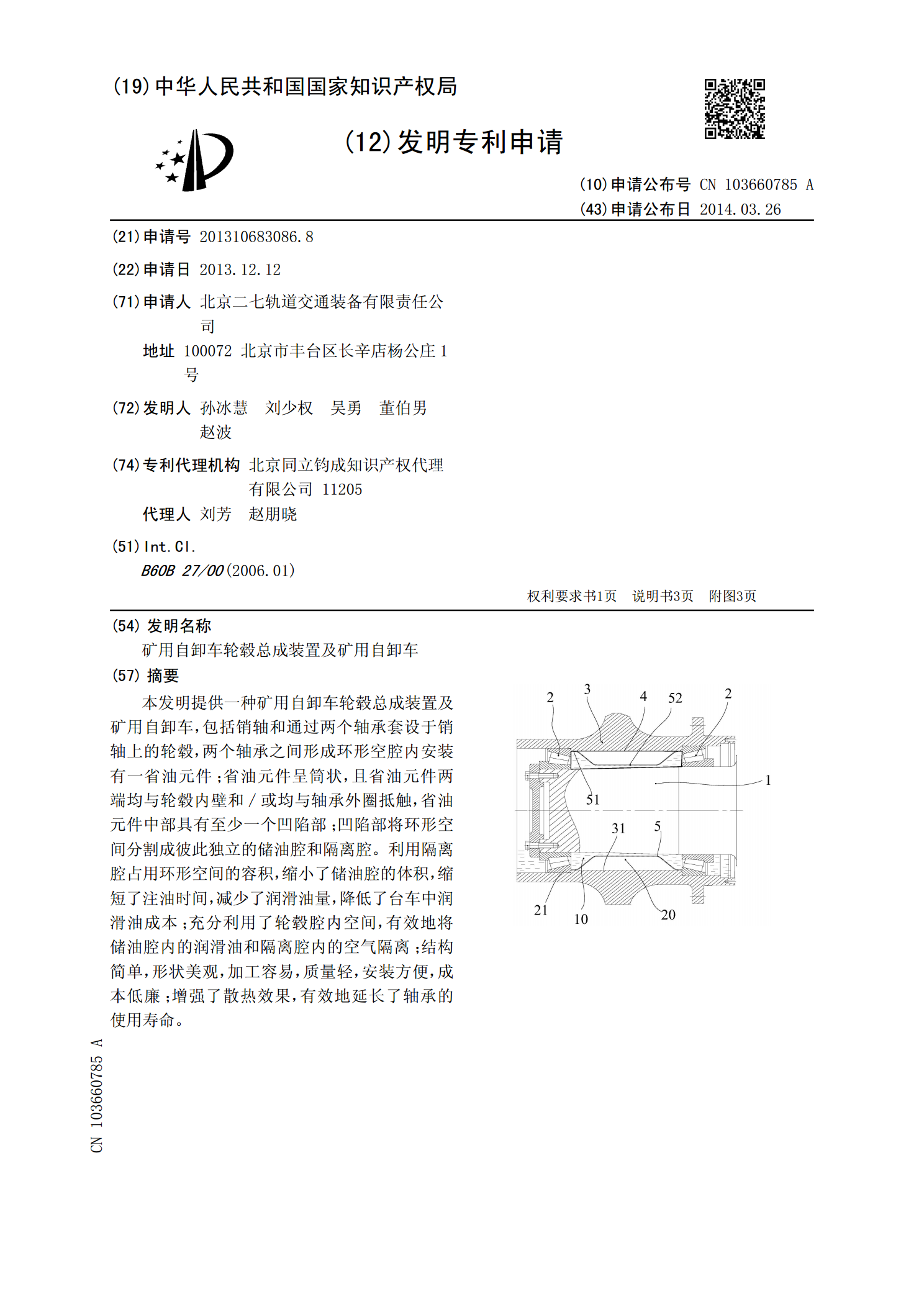
本发明提供一种矿用自卸车轮毂总成装置及矿用自卸车,包括销轴和通过两个轴承套设于销轴上的轮毂,两个轴承之间形成环形空腔内安装有一省油元件;省油元件呈筒状,且省油元件两端均与轮毂内壁和/或均与轴承外圈抵触,省油元件中部具有至少一个凹陷部;凹陷部将环形空间分割成彼此独立的储油腔和隔离腔。利用隔离腔占用环形空间的容积,缩小了储油腔的体积,缩短了注油时间,减少了润滑油量,降低了台车中润滑油成本;充分利用了轮毂腔内空间,有效地将储油腔内的润滑油和隔离腔内的空气隔离;结构简单,形状美观,加工容易,质量轻,安装方便,成本

CAN总线及SAE J1939在矿用自卸车电气 控制系统中的应用.docx
CAN总线及SAEJ1939在矿用自卸车电气控制系统中的应用摘要CAN总线作为一种高效可靠的通信协议,在矿用自卸车电气控制系统中得到广泛应用。SAEJ1939协议作为CAN总线的一种应用标准,提供了一种统一的通信和数据传输方式,使得各个子系统可以高效地进行通信和交互。本文针对矿用自卸车电气控制系统中CAN总线及SAEJ1939的应用进行了详细探讨,并讨论了其在矿用自卸车电气控制系统中的优势和挑战。1.引言矿用自卸车电气控制系统具有复杂的功能和各种不同的子系统,如发动机控制、传输系统控制、刹车系统控制等。为

矿用电动轮自卸车控制系统及矿用电动轮自卸车.pdf
本发明提供一种矿用电动轮自卸车控制系统及矿用电动轮自卸车,其中,矿用电动轮自卸车控制系统包括:发电机,与柴油机同轴连接;电动机,与轮边减速器连接,所述轮边减速器能够带动所述电动机发出三相交流电;电控柜,分别与所述发电机和电动机电性连接,用于将所述电动机所产生的三相交流电整流和逆变后传递给所述发电机,使所述发电机带动所述柴油机正转。本发明能够节省能源。

矿用自卸车智能管理与控制装置.pdf
本发明公开一种矿用自卸车智能管理与控制装置,其包括矿用自卸车自带的蓄电池/发电机电路、组合仪表、各种传感器,还包括ARM微控制器、电源模块、锂电池、电源电路、LED驱动电路、LED显示屏、GPS/GPRS模块、串口通信电路、SD存储卡、数据储存电路、震荡信号电路、JTAG电路、键盘电路、蜂鸣器报警电路、称重传感器、称重调理电路、转速调理电路、仪表控制电路、非法使用控制电路、熄火电路、取力器电路和气路调压电路。本装置可广泛用于矿用自卸车,能有效防止用户超载使用以及尾款未支付而非法使用。