
伸缩腿双足机器人半被动行走控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

伸缩腿双足机器人半被动行走控制研究.docx
伸缩腿双足机器人半被动行走控制研究摘要:伸缩腿双足机器人是一种新兴的机器人形态,其具有高效性和智能性,广泛应用于现代工业和生活中。本文基于伸缩腿双足机器人实践,重点探讨了半被动行走控制策略。首先介绍了伸缩腿双足机器人的相关技术,然后提出了半被动控制方法,给出了实验结果及分析。研究结果表明,半被动控制具有优秀的性能,可以有效地保持机器人的稳定性,适应不同环境的行走任务。关键词:伸缩腿双足机器人;半被动控制;行走稳定性;控制策略。一、绪论伸缩腿双足机器人是一种新兴的机器人形态,它能够模拟人的步态,具有高效性和

变刚度双足机器人半被动行走控制研究.docx
变刚度双足机器人半被动行走控制研究摘要本文研究了变刚度双足机器人半被动行走控制。首先介绍了双足机器人的发展背景及其现状,随后引入了半被动控制的概念及其优势。接着详细探讨了变刚度控制的原理和方法,并给出了设计方案。最后通过实验验证了变刚度双足机器人半被动行走控制的有效性。关键词:双足机器人,半被动控制,变刚度控制,半被动行走AbstractThispaperstudiesthehalf-passivewalkingcontrolofavariablestiffnessbipedrobot.Firstly,t

基于脉冲推力作用的双足机器人半被动行走.docx
基于脉冲推力作用的双足机器人半被动行走标题:基于脉冲推力作用的双足机器人半被动行走摘要:双足机器人的半被动行走是一种结合动态步态规划和脉冲推力控制策略的方法。本论文将介绍双足机器人半被动行走的原理、优势和挑战,并详细阐述其在实际应用中的潜力。通过研究半被动行走引入的脉冲推力作用,可以为机器人的稳定性和能耗优化提供新的解决方案。1.引言双足机器人是模拟人类行走的一种智能机器人。在实际应用中,稳定性和能耗是双足机器人设计中面临的挑战。为了更好地解决这些问题,半被动行走方法应运而生。脉冲推力作用作为关键因素,在
一种半被动双足对分上体行走装置.pdf
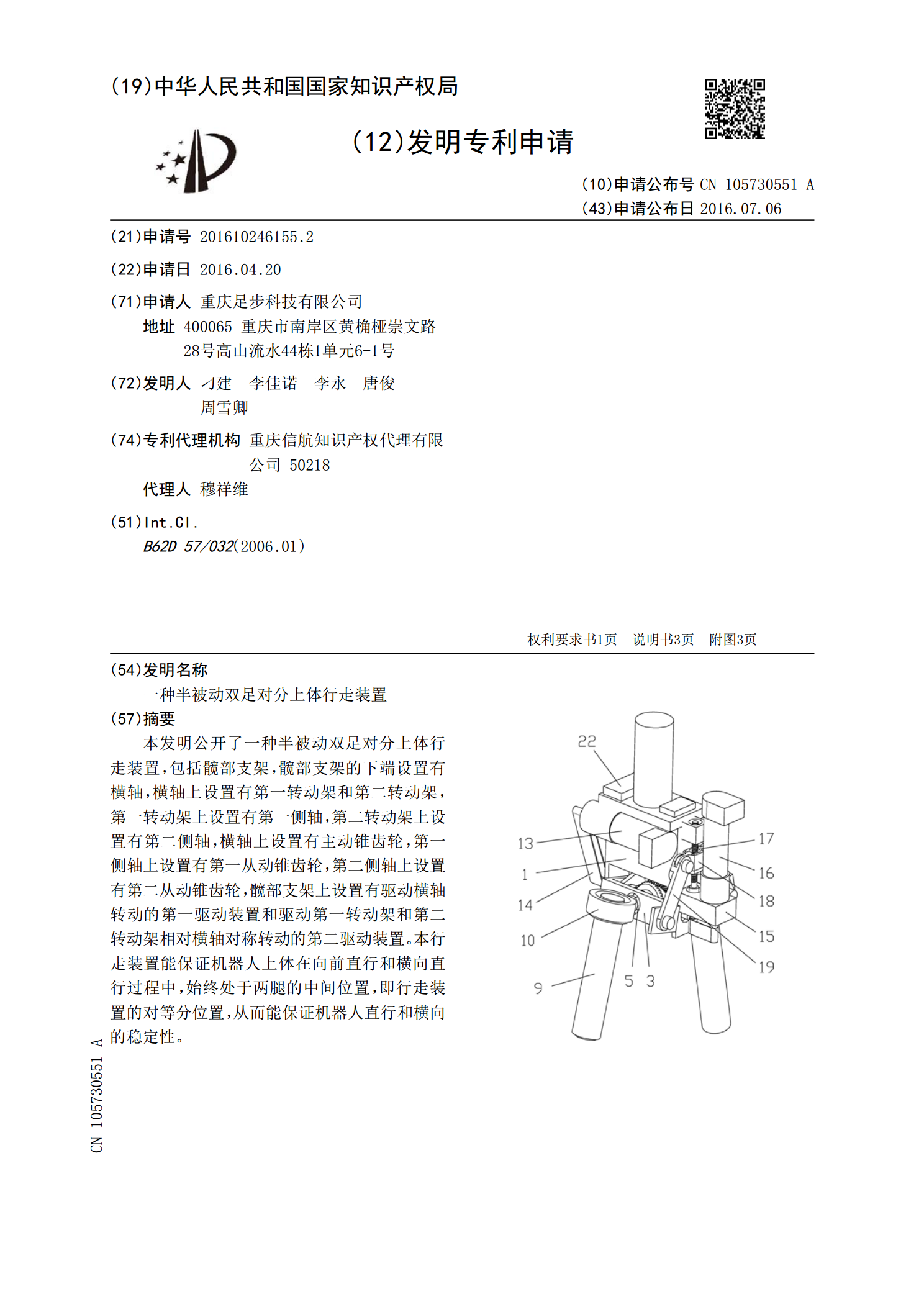
本发明公开了一种半被动双足对分上体行走装置,包括髋部支架,髋部支架的下端设置有横轴,横轴上设置有第一转动架和第二转动架,第一转动架上设置有第一侧轴,第二转动架上设置有第二侧轴,横轴上设置有主动锥齿轮,第一侧轴上设置有第一从动锥齿轮,第二侧轴上设置有第二从动锥齿轮,髋部支架上设置有驱动横轴转动的第一驱动装置和驱动第一转动架和第二转动架相对横轴对称转动的第二驱动装置。本行走装置能保证机器人上体在向前直行和横向直行过程中,始终处于两腿的中间位置,即行走装置的对等分位置,从而能保证机器人直行和横向的稳定性。

双足行走机器人平衡控制译文.docx
外文资料:Robots1.IntroductionNowadays,theapplicationsofmachinesandrobotstoassisthumaninperformingtheirtaskshasbecomeincreasinglyextensive.Inindustrialapplications,theuseofroboticssystemhasreachedthelevelwhichsurpasseshumanabilityintermsofspeedandaccuracy.Onth