
一种六自由度上肢康复训练机器人运动学及工作空间仿真分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种六自由度上肢康复训练机器人运动学及工作空间仿真分析.docx
一种六自由度上肢康复训练机器人运动学及工作空间仿真分析一种六自由度上肢康复训练机器人运动学及工作空间仿真分析摘要:随着人口老龄化的加剧和健康意识的觉醒,康复训练成为了一项重要的研究领域。为了辅助康复治疗和提高治疗效果,研究人员开发了各种各样的康复训练机器人。本文提出了一种六自由度上肢康复训练机器人,并对其运动学及工作空间进行了详细的仿真分析。1.引言上肢康复训练机器人在康复治疗中起着不可忽视的作用。通过机器人辅助下的康复训练,患者可以恢复受损或受伤的肌肉和关节功能。因此,设计一种有效的上肢康复训练机器人对

六自由度检修机器人工作空间仿真分析.docx
六自由度检修机器人工作空间仿真分析标题:六自由度检修机器人工作空间仿真分析摘要:本文通过对六自由度检修机器人工作空间的仿真分析,探究机器人在不同工作环境中的灵活性和可操作性。首先,介绍了六自由度检修机器人的基本概念和结构。然后,利用仿真软件对机器人进行工作空间分析,通过绘制机器人的运动范围图和碰撞检测图,评估机器人在不同工作环境中的可达性和安全性。最后,对仿真结果进行分析和讨论,提出了进一步改进机器人设计的建议。关键词:六自由度检修机器人、工作空间、仿真分析、可达性、安全性1.引言在各个领域,机器人的应用

六自由度上肢康复机器人运动学分析与轨迹规划.docx
六自由度上肢康复机器人运动学分析与轨迹规划摘要:近年来,随着人口老龄化的加剧及临床需求的增加,在康复领域中,机器人技术的应用正日益受到关注。六自由度上肢康复机器人能够提供更加有效、精准、可控的治疗手段,因此越来越多的研究者开始关注与研究该技术。本文将介绍六自由度上肢康复机器人的运动学分析与轨迹规划的研究现状及未来发展趋势,并探讨其在康复领域中的应用前景。关键词:上肢康复机器人、运动学分析、轨迹规划、康复领域、应用前景一、引言随着社会经济的不断发展和医疗技术的不断提升,人们对康复医学的关注度也越来越高。康复

三自由度上肢康复机器人运动学分析和运动轨迹规划仿真.docx
三自由度上肢康复机器人运动学分析和运动轨迹规划仿真三自由度上肢康复机器人运动学分析和运动轨迹规划仿真摘要:随着人口老龄化程度的加剧,上肢功能障碍的康复需求不断增加。本论文以三自由度上肢康复机器人为研究对象,对其运动学分析和运动轨迹规划进行仿真研究。首先,通过建立机器人的运动学模型,分析机器人各关节的运动范围和角度。然后,利用规划算法对康复动作的运动轨迹进行规划,提高机器人的康复效果。最后,通过仿真实验,验证所提出方法的有效性和可行性。关键词:上肢康复机器人、运动学分析、运动轨迹规划、仿真研究引言:随着人口
二自由度上肢康复训练机器人系统.pdf
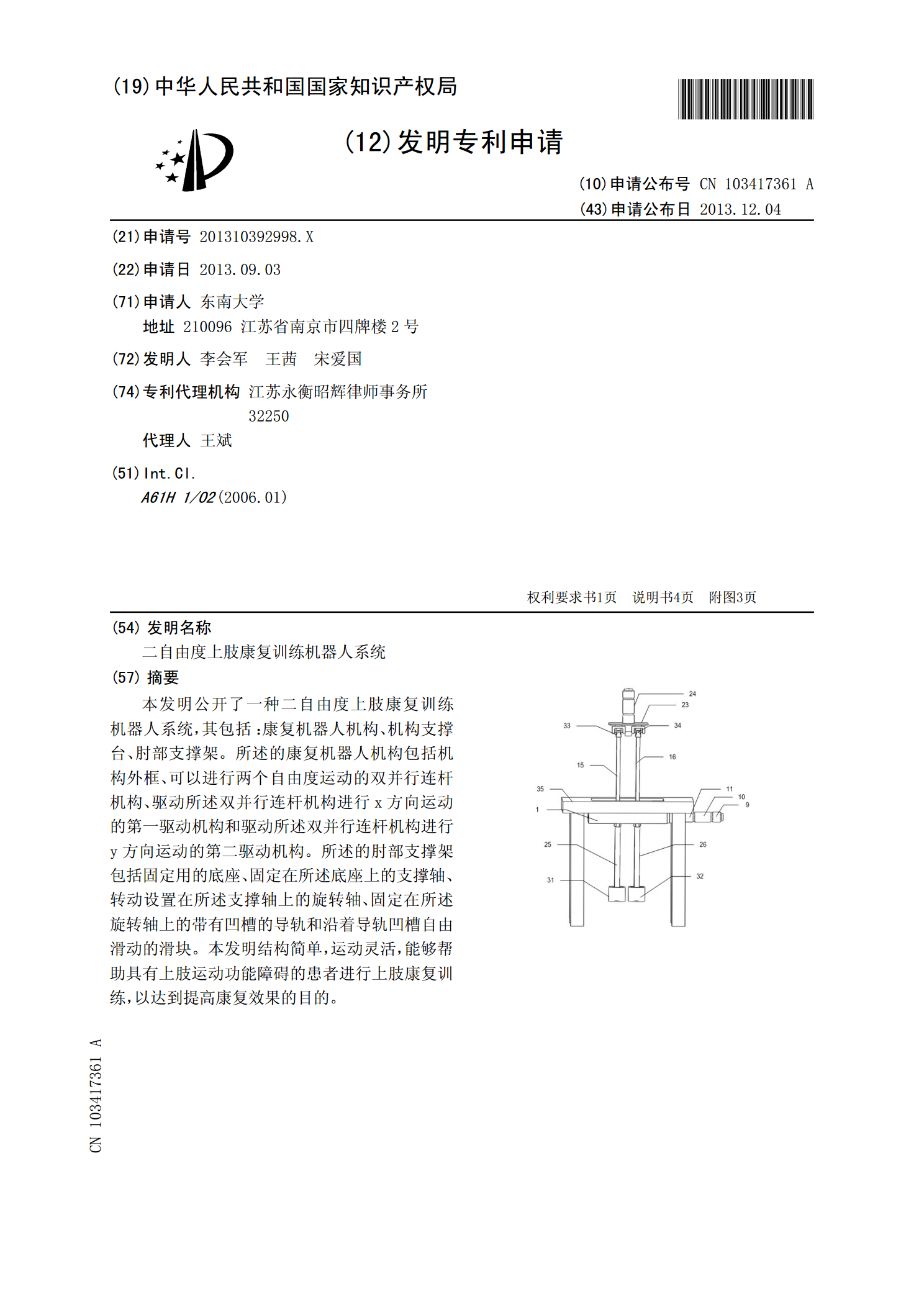
本发明公开了一种二自由度上肢康复训练机器人系统,其包括:康复机器人机构、机构支撑台、肘部支撑架。所述的康复机器人机构包括机构外框、可以进行两个自由度运动的双并行连杆机构、驱动所述双并行连杆机构进行x方向运动的第一驱动机构和驱动所述双并行连杆机构进行y方向运动的第二驱动机构。所述的肘部支撑架包括固定用的底座、固定在所述底座上的支撑轴、转动设置在所述支撑轴上的旋转轴、固定在所述旋转轴上的带有凹槽的导轨和沿着导轨凹槽自由滑动的滑块。本发明结构简单,运动灵活,能够帮助具有上肢运动功能障碍的患者进行上肢康复训练,以