
一种动态环境下空间机器人的快速路径规划方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种动态环境下空间机器人的快速路径规划方法.docx
一种动态环境下空间机器人的快速路径规划方法标题:一种适用于动态环境下空间机器人的快速路径规划方法摘要:随着空间机器人在各类任务中的广泛应用,如宇航探测、电力巡检、环境监测等,快速且可靠的路径规划方法成为空间机器人领域的一个重要问题。由于动态环境中障碍物的变化,路径规划需要适应实时变化的环境,并能快速生成可行且安全的路径。本文提出了一种适用于动态环境下空间机器人的快速路径规划方法,通过柔性网络和遗传算法相结合,实现了高效的路径规划。关键词:空间机器人、动态环境、路径规划、柔性网络、遗传算法1.引言空间机器人

一种动态环境下的移动机器人路径规划方法.pdf
本发明公开了一种动态环境下的移动机器人路径规划方法。通过移动机器人所携带的激光雷达获取原始数据与动态障碍物信息;对原始数据进行数据处理后,与移动机器人周围的信息结合后得到DDPG算法的状态S;设计DDPG算法的状态空间、动作空间和奖励函数,所述奖励函数包括移动机器人与目标直线距离的奖惩、与动态障碍物碰撞的惩罚以及到达目标点的奖励;根据速度和运动的特点构建多类型动态障碍物环境;将DDPG算法与好奇心算法相融合,建立内外奖励共同作用的奖励机制;移动机器人使用改进完成的DDPG算法在建立的环境中进行训练学习,实

一种室内导盲机器人在动态环境下的路径规划方法.pdf
一种室内导盲机器人在动态环境下的路径规划方法,通过生成环境的栅格地图、膨胀处理、给定目标点、采集地图信息、规划出一条全局路线、局部路径规划、避障及返回全局路线的方式,完成任意动态环境下的导盲机器人的路线规划及运动;降低了局部避障的随机性,提高了动态环境下避障的可靠性;随机路图法避免局部极小值,考虑规划效率,不会增加计算量;导盲机器人会尽可能的沿着全局路线行走,这样大大的保证了盲人在行进过程中的安全。

一种动态未知环境下的机器人路径搜索方法.docx
一种动态未知环境下的机器人路径搜索方法机器人在未知环境中进行路径搜索具有很高的实际应用价值,如自主导航、物料搬运、空间探测等领域。然而,在动态未知环境下进行路径搜索还存在一系列挑战,如环境变化导致路径失效、机器人避障问题等。因此,本篇论文提出了一种适用于动态未知环境下的机器人路径搜索方法。该方法包括以下三个主要方面:环境建模、路径规划和机器人运动控制。首先,对于未知环境的建模,我们采用了基于激光雷达和SLAM算法的方法。激光雷达可以采集周围环境的点云数据,通过SLAM算法可以生成地图。与基于视觉的方法相比
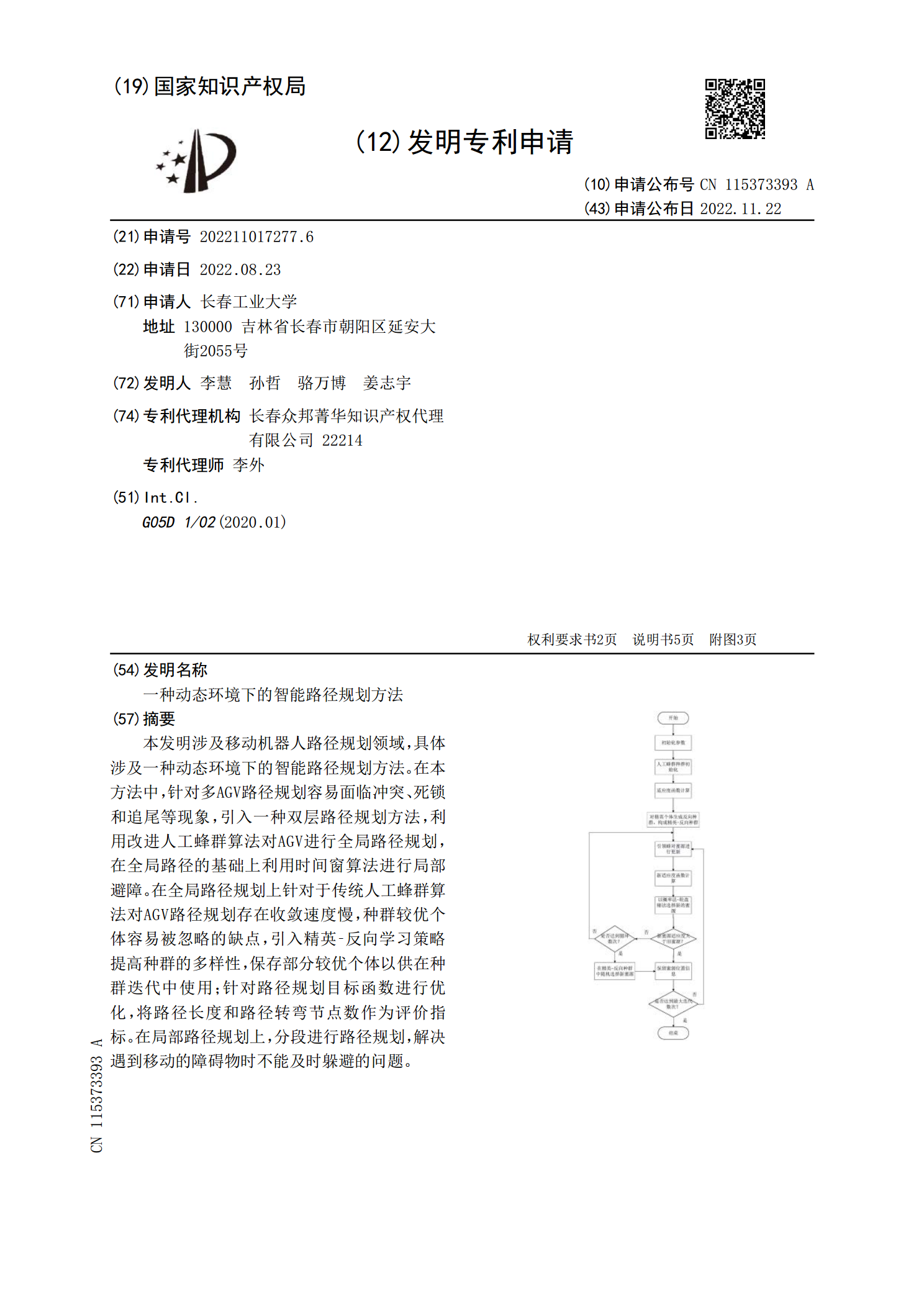
一种动态环境下的智能路径规划方法.pdf
本发明涉及移动机器人路径规划领域,具体涉及一种动态环境下的智能路径规划方法。在本方法中,针对多AGV路径规划容易面临冲突、死锁和追尾等现象,引入一种双层路径规划方法,利用改进人工蜂群算法对AGV进行全局路径规划,在全局路径的基础上利用时间窗算法进行局部避障。在全局路径规划上针对于传统人工蜂群算法对AGV路径规划存在收敛速度慢,种群较优个体容易被忽略的缺点,引入精英‑反向学习策略提高种群的多样性,保存部分较优个体以供在种群迭代中使用;针对路径规划目标函数进行优化,将路径长度和路径转弯节点数作为评价指标。在局