
3自由度混合柔性铰链微定位平台的设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

3自由度混合柔性铰链微定位平台的设计与分析.docx
3自由度混合柔性铰链微定位平台的设计与分析标题:3自由度混合柔性铰链微定位平台的设计与分析摘要:本文介绍了一个3自由度混合柔性铰链微定位平台的设计与分析。该平台采用了柔性铰链结构,具有较高的定位精度和柔性控制能力。文章首先介绍了柔性铰链的原理和优势,并设计了适用于微定位的柔性铰链结构。接着,根据设计要求,设计了相应的控制算法和系统结构。最后,通过仿真和实验证明了该平台的有效性和优越性。关键词:微定位平台、混合柔性铰链、设计、分析、控制算法引言:微定位平台广泛应用于精密加工、准确定位和测试等领域。为了提高平

3-PPP型柔性并联微定位平台的设计与分析.docx
3-PPP型柔性并联微定位平台的设计与分析设计与分析3-PPP型柔性并联微定位平台摘要:在许多微操作任务中,需要高精度的微定位平台来执行各种微操作。本论文提出了一种基于3-PPP(平行驱动、平行排列)型柔性并联机构的微定位平台的设计与分析。该设计结构简单、可靠性高,并且具有较大的平行度。对该平台进行了力学建模和动力学分析,并验证了其可行性和性能。结果表明,该平台能够实现高精度的微位移和微操作。1.引言微操作技术在多个领域发展迅速,如微加工、显微镜观察、生物医学等。为了实现高精度的微操作,需要使用精密的微定
一种基于柔性铰链的单自由度大行程纳米位移定位平台.pdf
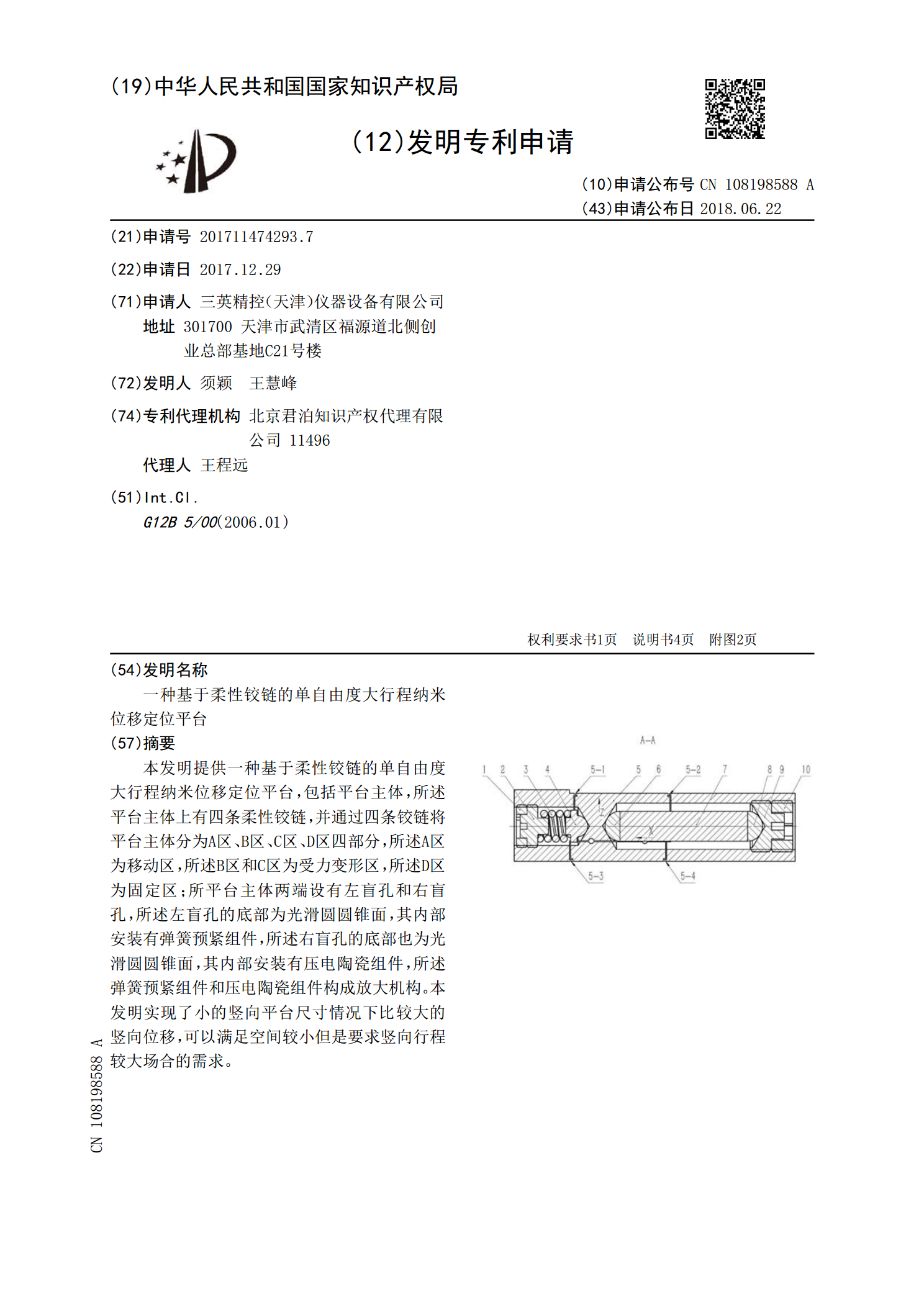
本发明提供一种基于柔性铰链的单自由度大行程纳米位移定位平台,包括平台主体,所述平台主体上有四条柔性铰链,并通过四条铰链将平台主体分为A区、B区、C区、D区四部分,所述A区为移动区,所述B区和C区为受力变形区,所述D区为固定区;所平台主体两端设有左盲孔和右盲孔,所述左盲孔的底部为光滑圆圆锥面,其内部安装有弹簧预紧组件,所述右盲孔的底部也为光滑圆圆锥面,其内部安装有压电陶瓷组件,所述弹簧预紧组件和压电陶瓷组件构成放大机构。本发明实现了小的竖向平台尺寸情况下比较大的竖向位移,可以满足空间较小但是要求竖向行程较大

基于蜂窝结构铰链的高精度Z向单自由度微定位平台.pdf
本发明公开了一种基于蜂窝结构铰链的高精度Z向单自由度微定位平台,包括蜂窝结构铰链支撑环,底座和压电陶瓷驱动器;所述蜂窝结构铰链支撑环包括位于其外围的外环、位于其中心的终端平台和介于外环与终端平台之间的蜂窝结构铰链,所述蜂窝结构铰链为由正六边形组成的蜂窝状结构;所述外环固定连接在所述底座上;所述压电陶瓷驱动器固定连接在所述底座内,所述终端平台的底部中心与所述压电陶瓷驱动器的顶端接触,由所述压电陶瓷驱动器产生Z向位移带动所述终端平台产生Z向位移。本发明采用基于仿生学原理设计的正六边形组成的蜂窝结构铰链,具有刚

基于柔性铰链混联的多自由度微进给工作台设计.docx
基于柔性铰链混联的多自由度微进给工作台设计基于柔性铰链混联的多自由度微进给工作台设计摘要:柔性铰链技术作为一种新型的机构设计方法,已经在各个领域得到广泛应用。本文基于柔性铰链混联技术,设计了一种多自由度微进给工作台。首先介绍了柔性铰链的原理和特点,然后详细阐述了多自由度微进给工作台的设计过程和结构设计,最后通过仿真和实验验证了该工作台的性能和可行性。关键词:柔性铰链;多自由度;微进给;工作台;设计1.引言随着微纳技术的发展和应用需求的增加,对微进给工作台的要求也越来越高。传统的进给工作台往往存在精度不高、