
基于快速终端滑模原理的无人车侧纵向耦合跟踪控制方法.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于快速终端滑模原理的无人车侧纵向耦合跟踪控制方法.pdf
本发明提供了一种基于快速终端滑模原理的无人车侧纵向耦合跟踪控制方法,包括:1)选择无人车侧纵向耦合跟踪控制器的输入参数和输出参数;2)定义跟踪控制误差及其状态方程;3)用跟踪控制误差作为状态变量,建立快速终端滑模;4)采用快速终端趋近率作为跟踪控制的滑模趋近率;5)根据车辆动力学模型及上述内容推导得出期望的驱动力或制动力和期望的侧向力之间的耦合关系;6)计算得出期望前轮转角;7)根据求得的逆纵向力模型输出的正负,判断当前应计算期望的节气门开度还是期望的制动力矩;8)计算期望的节气门开度或制动力矩。从仿真结

基于模糊逻辑的无人驾驶车纵向多滑模控制.docx
基于模糊逻辑的无人驾驶车纵向多滑模控制基于模糊逻辑的无人驾驶车纵向多滑模控制摘要:无人驾驶技术是未来交通领域的重要发展方向之一。为了提高无人驾驶车辆的安全性和性能,本文提出了一种基于模糊逻辑的纵向多滑模控制方法。该方法通过模糊控制器和滑模控制器的组合使用,实现了对无人驾驶车辆的跟踪控制和防滑控制。模拟实验结果表明,所提出的方法可以有效地提高无人驾驶车辆的行驶稳定性和安全性,具有很好的应用前景。关键词:无人驾驶车辆;纵向控制;多滑模控制;模糊逻辑一、引言无人驾驶技术是近年来得到广泛研究和应用的领域之一。无人

一种基于快速终端滑模的蜂群无人机容错协同控制方法.pdf
本申请公开了一种基于快速终端滑模的蜂群无人机容错协同控制方法,涉及无人机技术领域,该方法基于固定翼无人机的位置跟踪误差设计得到非奇异快速终端滑模面,再结合固定翼无人机的动力学模型引入包含故障相关项和外界扰动项的总未知项和命令控制输入信号,从而构建得到固定翼无人机的容错控制律,利用基于快速终端滑模设计得到的容错控制律对蜂群无人机进行容错协同控制,在无人机遭遇执行器故障或外界扰动时仍然可以保持蜂群无人机的稳定飞行,还使得各无人机可以对期望位置进行编队跟踪,在蜂群无人机的编队协同容错控制上具有很好的实际意义和应

基于自适应快速终端滑模的车轮滑移率跟踪控制.docx
基于自适应快速终端滑模的车轮滑移率跟踪控制基于自适应快速终端滑模的车轮滑移率跟踪控制摘要:随着汽车工业的发展,对于车轮滑移率的控制成为了关键的研究领域。本文提出了一种基于自适应快速终端滑模的车轮滑移率跟踪控制方法。该方法能够通过对车辆动力学模型的建立,实现对车轮滑移率的准确测量,并通过自适应控制策略来实现滑移率的跟踪控制。实验结果表明,该方法能够有效地减小车轮滑移率,提高车辆的操控性和行驶安全性。关键词:车轮滑移率,自适应控制,快速终端滑模,车辆动力学模型引言:车轮滑移率的控制对于汽车的操控性和行驶安全性
基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法.pdf
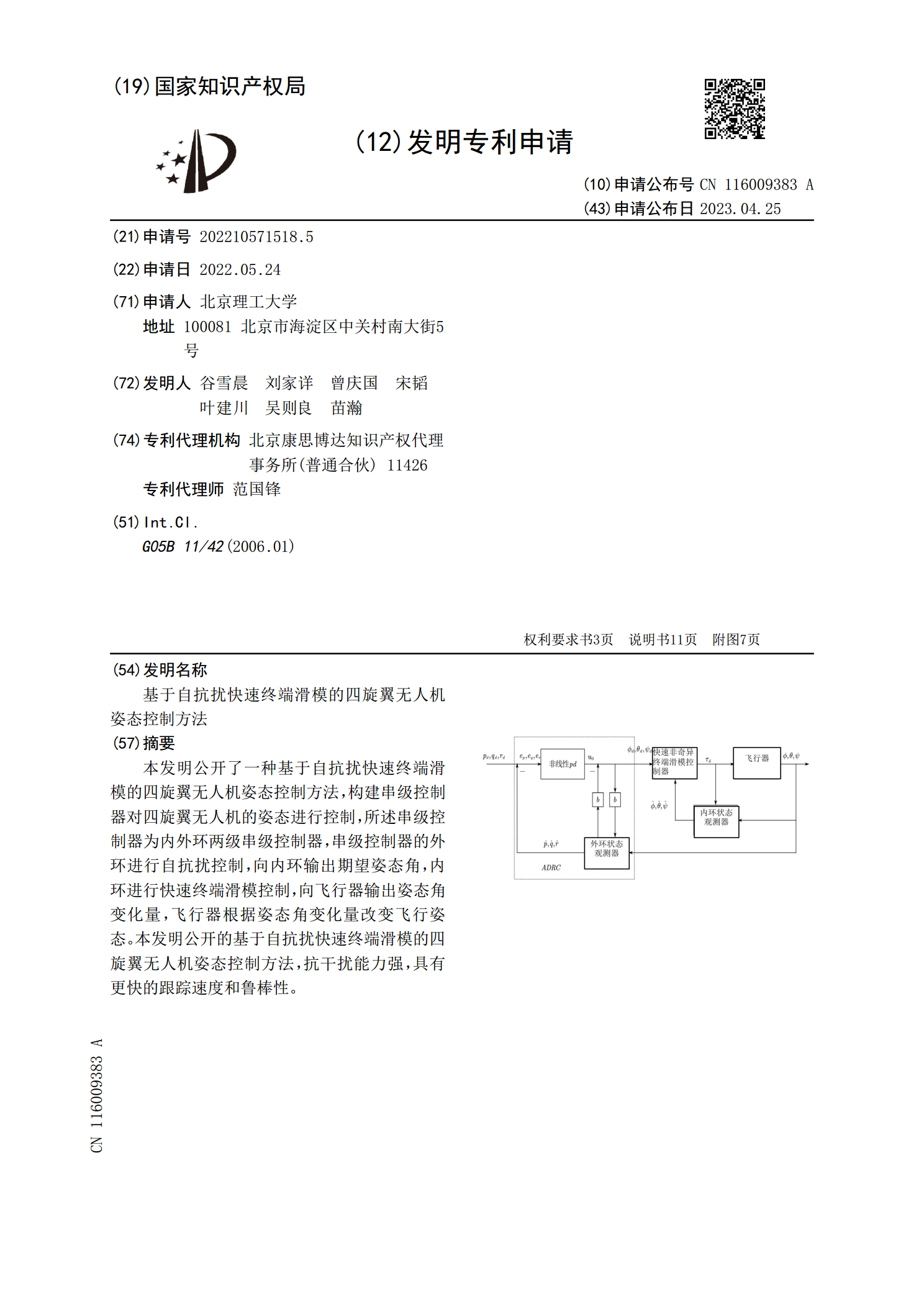
本发明公开了一种基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,构建串级控制器对四旋翼无人机的姿态进行控制,所述串级控制器为内外环两级串级控制器,串级控制器的外环进行自抗扰控制,向内环输出期望姿态角,内环进行快速终端滑模控制,向飞行器输出姿态角变化量,飞行器根据姿态角变化量改变飞行姿态。本发明公开的基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,抗干扰能力强,具有更快的跟踪速度和鲁棒性。