
一种微型软体模块化可重构机器人单元模块.pdf

梅雪****67


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种微型软体模块化可重构机器人单元模块.pdf
一种机器人技术领域的微型软体模块化可重构机器人单元模块,包括:一个转向机构,一个驱动机构,一个支撑机构,一个主动连接机构和一个被动连接机构。其中转向机构包括:一个转向前面板、一个转向后面板、四根形状记忆合金(SMA)丝;驱动机构包括:一个驱动前面板、一个驱动后面板、一个直流电机、一个齿轮传动减速机构、一根蜗杆、一个月牙板、两根导柱和一个后盖。采用形状记忆合金作为机器人单元模块的转向驱动器,通过协调控制四根形状记忆合金丝可以实现转向机构伸缩或任意方向弯曲,使得机构能够到达工作空间内的大部分位置。单个模块能够

一种模块化可重构机器人的单元模块机构.pdf
一种模块化可重构机器人的单元模块机构,包括前臂、后臂和连杆装置,前臂和后臂均设有二个对接面装置,前臂包括L形半圆外板、电路板、旋转齿轮和轴承,电路板和旋转齿轮分别固定在L形半圆外板不同侧的内壁上,轴承固定在L形半圆外板两侧的中心安装孔内;后臂关节的结构和前臂关节完全相同;连杆装置包含驱动连接轴、从动连接轴、直流电机和电机齿轮,连接轴的两端均分别与前臂和后臂的轴承连接,直流电机固定在驱动连接轴的两端,固定在直流电机输出轴上的两个电机齿轮分别与前臂关节或后臂关节的旋转齿轮相啮合。本发明的单元模块结构简单,运动

可重构模块化机器人.pptx
可重构模块化机器人目录工业机器人的国内外发展趋势第一阶段:示教再现型机器人第二阶段:离线编程机器人第三阶段:智能机器人传统工业机器人可重构模块化机器人国外可重构模块化机器人研究现状国外可重构模块化机器人研究现状国外可重构模块化机器人研究现状国外可重构模块化机器人研究现状国外可重构模块化机器人研究现状国外可重构模块化机器人研究现状国内可重构模块化机器人研究现状国内可重构模块化机器人研究现状国内可重构模块化机器人研究现状模块化可重构机器人(MRR)特点模块化可重构机器人研究内容模块化关节构型模块化关节构型模块

一种可全向运动的模块化自重构机器人的单元模块结构.pdf
一种用于构建模块化自重构机器人的单元模块,包含机身、俯仰关节、对接装置和运动轮装置。其中:机身整体为六面体结构,包括上外壳部分和下外壳部分,主电路板和三个驱动电机安装固定在机身外壳内壁;俯仰关节是将舵机固定在左、右舵机固定框上构成U形舵机关节,并通过舵盘和轴承实现与机身连接;对接装置包括主动对接机构和被动对接机构,主动对接机构通过步进电机驱动齿轮旋转钩旋转,被动对接机构为带槽板,与机身被动对接面安装固定;运动轮装置包括三个独立同构的全向轮运动机构,三者与机身固定且呈正三角形分布,并通过直流电机驱动。本发明
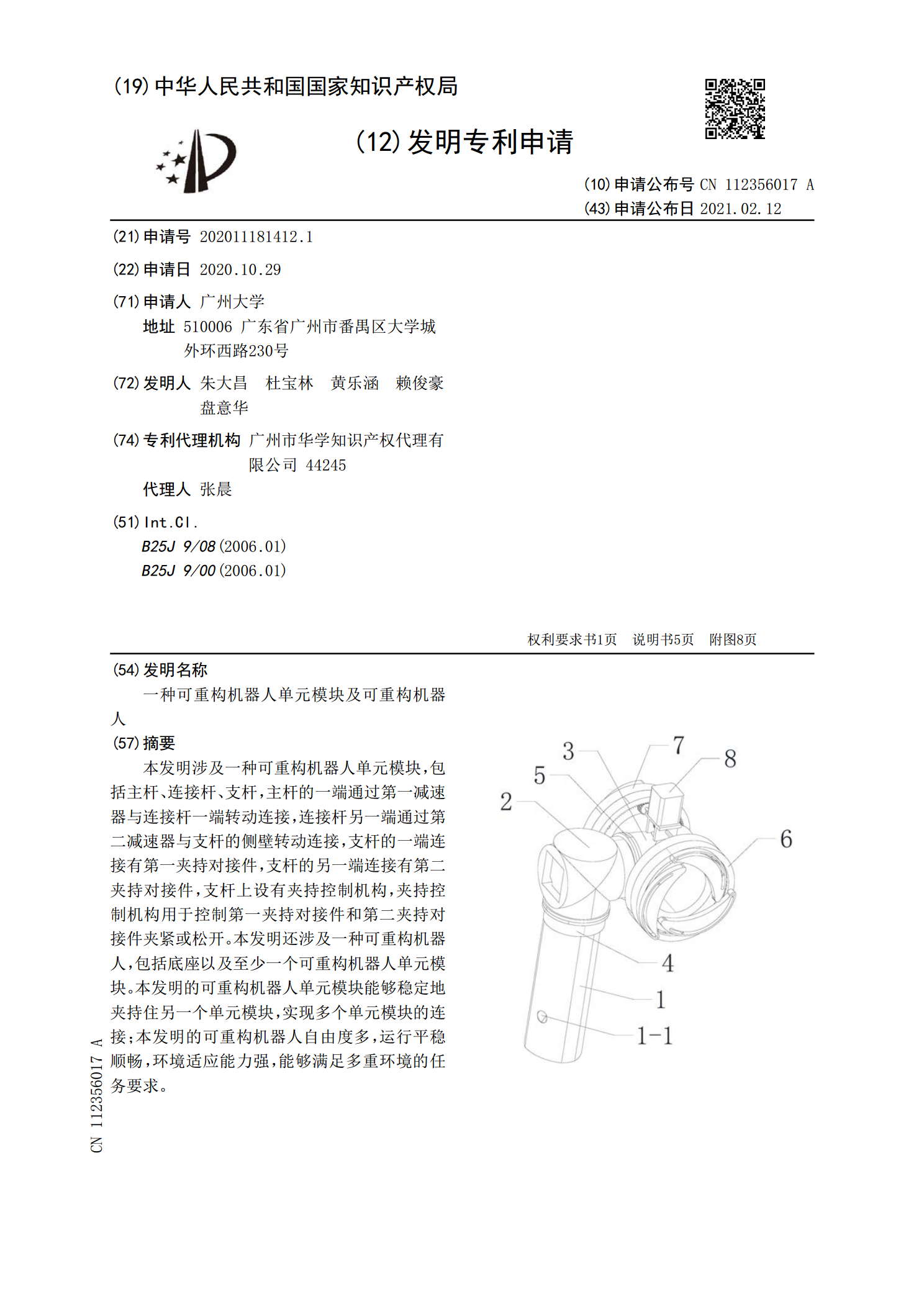
一种可重构机器人单元模块及可重构机器人.pdf
本发明涉及一种可重构机器人单元模块,包括主杆、连接杆、支杆,主杆的一端通过第一减速器与连接杆一端转动连接,连接杆另一端通过第二减速器与支杆的侧壁转动连接,支杆的一端连接有第一夹持对接件,支杆的另一端连接有第二夹持对接件,支杆上设有夹持控制机构,夹持控制机构用于控制第一夹持对接件和第二夹持对接件夹紧或松开。本发明还涉及一种可重构机器人,包括底座以及至少一个可重构机器人单元模块。本发明的可重构机器人单元模块能够稳定地夹持住另一个单元模块,实现多个单元模块的连接;本发明的可重构机器人自由度多,运行平稳顺畅,环境