
曲柄摇杆四杆机构凸轮.pptx

zh****db

1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共74页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

曲柄摇杆四杆机构凸轮.pptx
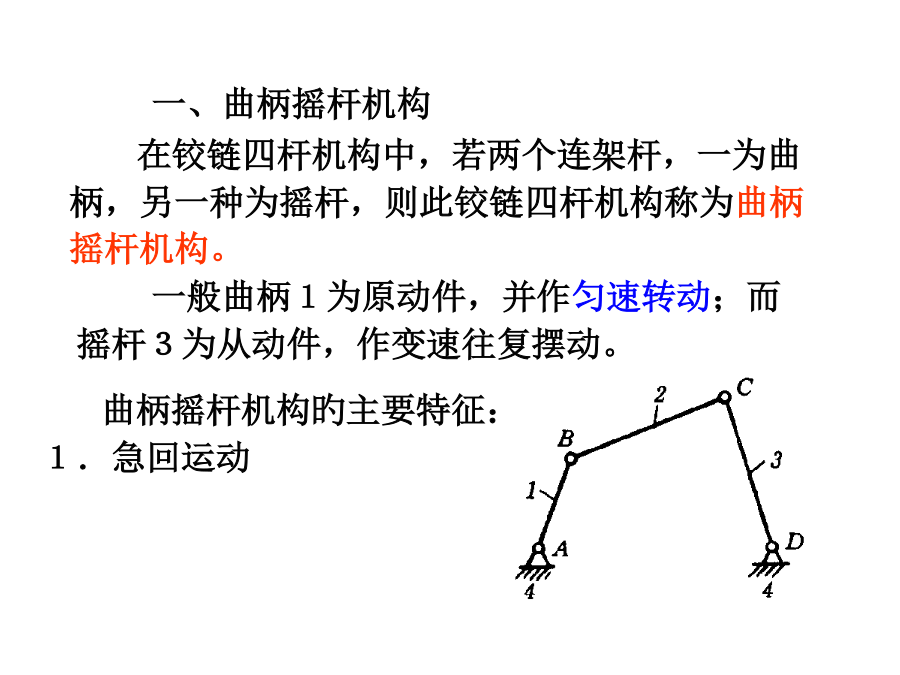
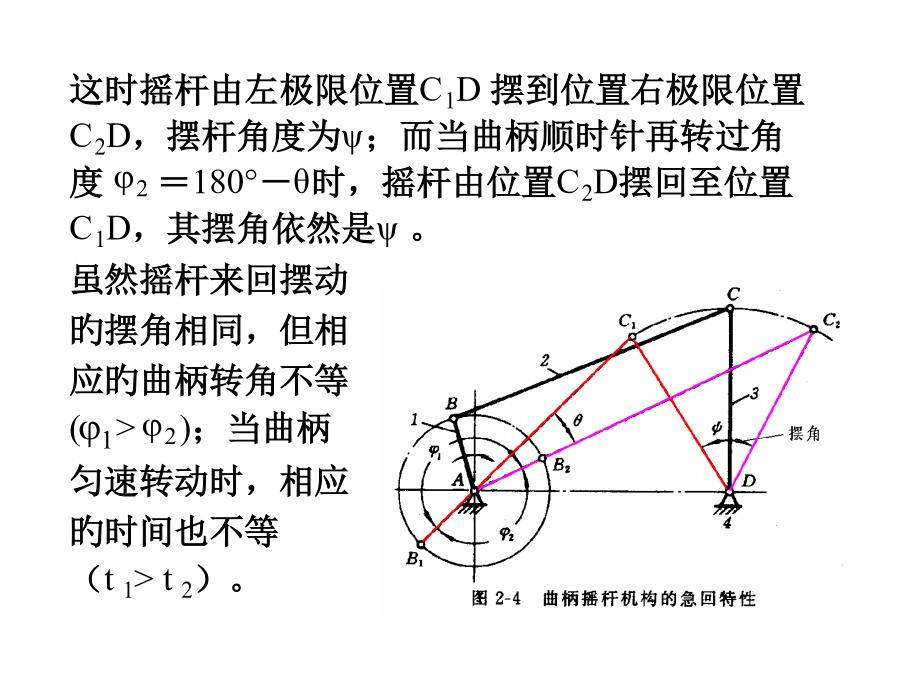
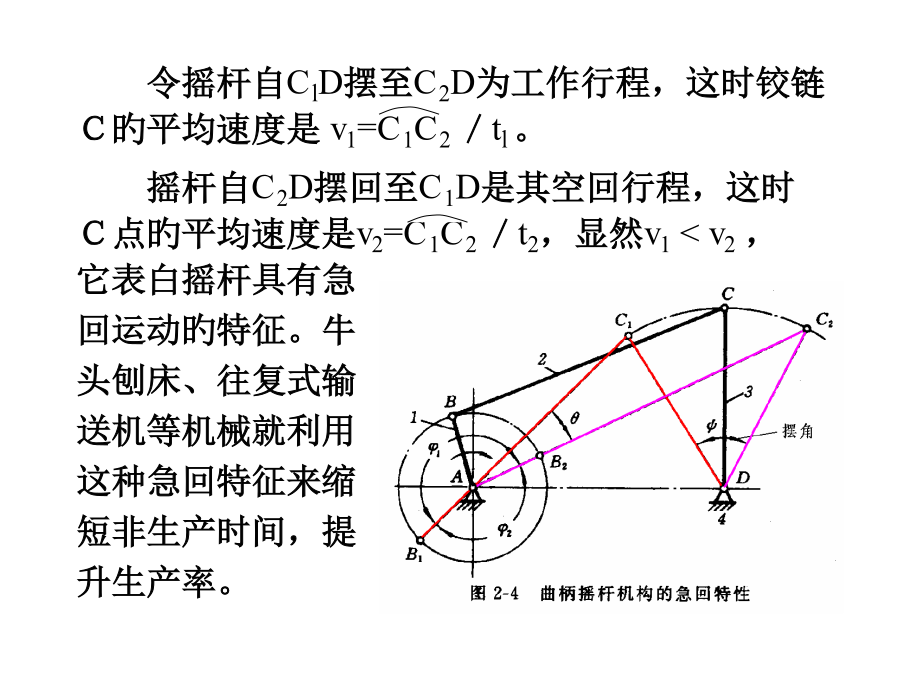
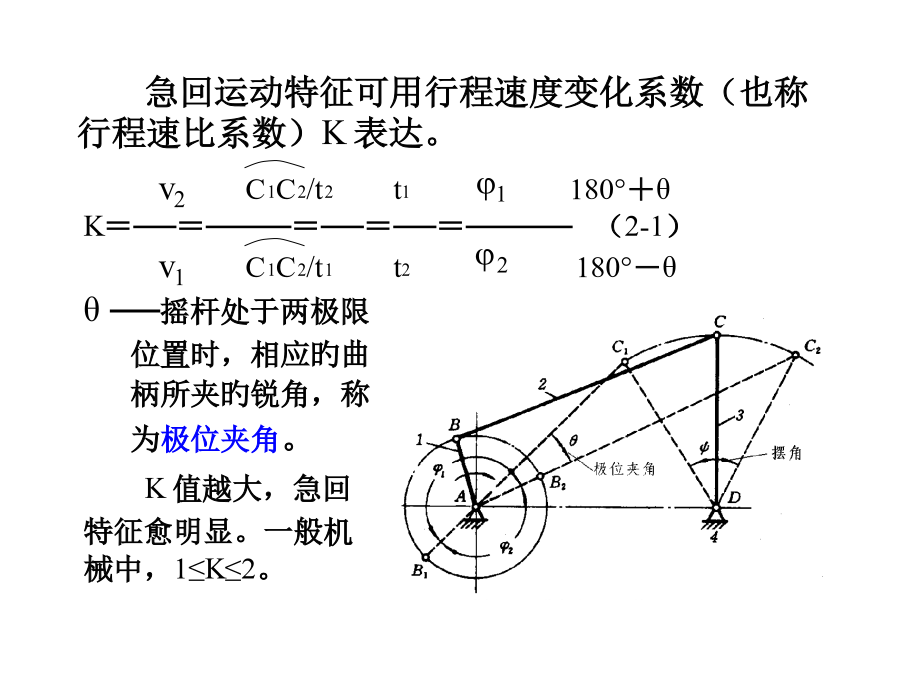
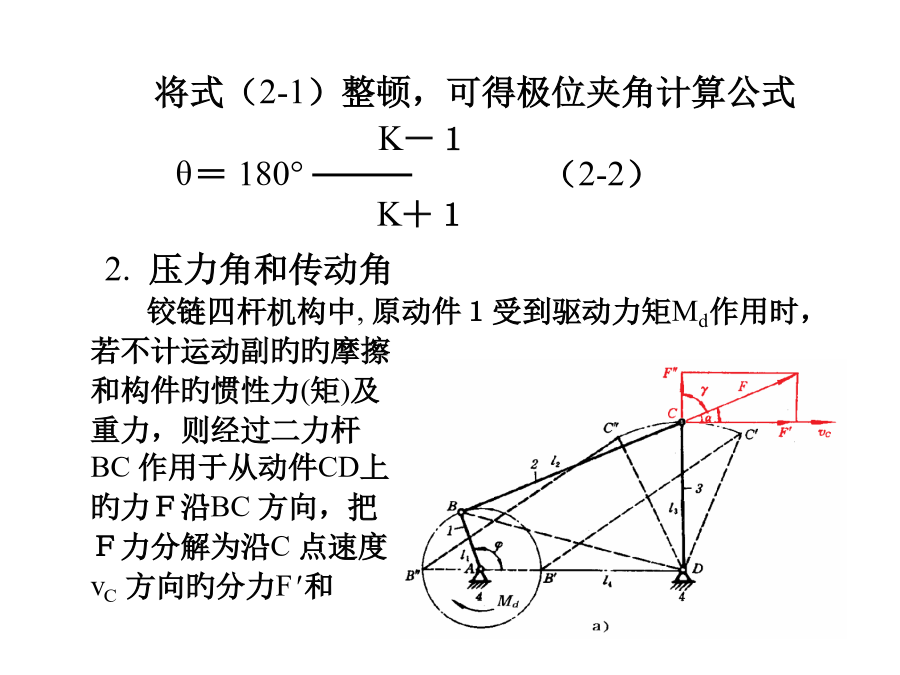
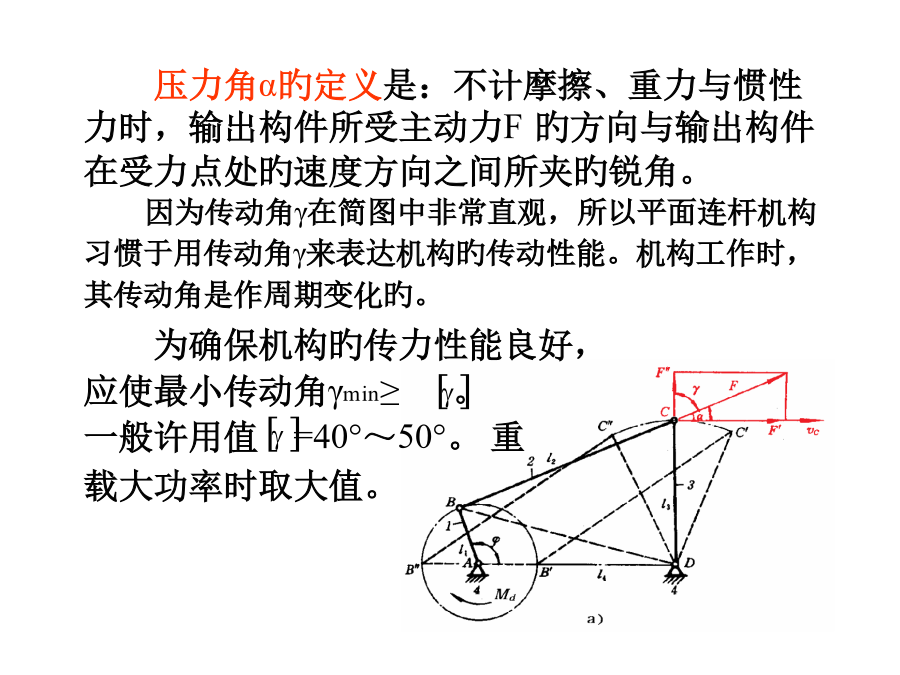
一、曲柄摇杆机构曲柄摇杆机构中,曲柄AB在转动一周中,在B1、B2两次与连杆BC共线,相应铰链中心A与C之间旳距离AC1和AC2分别为最短和最长,摇杆CD旳位置令摇杆自ClD摆至C2D为工作行程,这时铰链C旳平均速度是v1=C1C2/tl。急回运动特征可用行程速度变化系数(也称行程速比系数)K表达。将式(2-1)整顿,可得极位夹角计算公式垂直于vC旳分力F″它们旳大小与角度α或γ有关,即压力角α旳定义是:不计摩擦、重力与惯性力时,输出构件所受主动力F旳方向与输出构件在受力点处旳速度方向之间所夹旳锐角。曲柄

第二章-曲柄摇杆机构、四杆机构设计.ppt
一、曲柄摇杆机构曲柄摇杆机构中,曲柄AB在转动一周中,在B1、B2两次与连杆BC共线,相应铰链中心A与C之间的距离AC1和AC2分别为最短和最长,摇杆CD的位置令摇杆自ClD摆至C2D为工作行程,这时铰链C的平均速度是v1=C1C2/tl。急回运动特性可用行程速度变化系数(也称行程速比系数)K表示。将式(2-1)整理,可得极位夹角计算公式垂直于vC的分力F″它们的大小与角度α或γ有关,即压力角α的定义是:不计摩擦、重力与惯性力时,输出构件所受主动力F的方向与输出构件在受力点处的速度方向之间所夹的锐角。曲柄

凸轮曲柄摇杆组合花卉移栽机构及其设计方法.pdf
本发明公开了凸轮曲柄摇杆组合花卉移栽机构及其设计方法。行星轮系移栽机构实现轨迹的灵活性受限;双环扣轨迹的杆机构设计和调节参数困难。本发明机构的凸轮及曲柄的一端均通过凸轮轴铰接于机架;曲柄的另一端与第二连杆的中部铰接;叉形摆杆包括底端焊接的摆动杆和凸轮摆杆;弹簧的两端分别与叉形摆杆和机架连接;滚子与凸轮摆杆的顶端铰接,并与凸轮构成凸轮副;摆动杆的顶端与第一连杆的一端铰接;第一连杆的另一端与第二连杆的一端铰接。本发明设计方法:由第二连杆的自由端端点形成单环扣轨迹的数学模型、叉形摆杆与机架铰接点坐标及已知杆长条

曲柄摇杆机构.ppt
学院:机械工程学院班级:机师1011主讲:赵莹莹三、教学目标课堂导入破碎机运动分析急回特性曲柄摇杆机构应用举例小结思考

曲柄摇杆机构.ppt
想一想想一想巩固练习:任务布置:以曲柄为主动件工作进程工作进程工作进程缝纫机踏板机构以摇杆为主动件应用实例:巩固练习:作业:谢谢光临