
仿青蛙跳跃机器人的结构优化与运动综合.pptx.pptx

志玉****爱啊

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
仿青蛙跳跃机器人的结构优化与运动综合.pptx.pptx
仿青蛙跳跃机器人的结构优化与运动综合随着人类探索地球的深入,在非结构环境下的勘测任务越来越多,可代替人类在恶劣条件下完成相关任务的仿生机器人渐渐成为机器人研制的热点。因而研制一种活动范围广、移动能力强、越障能力卓越且避险反应迅速的仿生机器人有着重要的理论研究意义和广阔的应用前景。本论文以青蛙为研究对象,从机构设计与仿真、结构优化设计与仿真、性能优化设计与仿真三个方面展开研究,旨在设计一种既具有较强越障能力,又具备很好环境适应性的仿青蛙跳跃机器人。论文主要工作内容如下:首先,以青蛙为研究对象,分析其骨骼结构

仿青蛙跳跃机器人.pdf
本发明公开了一种仿青蛙跳跃机器人,躯干安装板装有前、后肢驱动机构,前、后肢驱动机构分别连接有前、后肢执行机构;前肢驱动机构和后肢驱动机构分别包括输入轴,输入轴上装有第二齿轮、单向轴承、不完全齿轮以及棘轮棘爪,第二齿轮通过齿轮传动到第二输出轴,不完全齿轮通过齿轮传动到第一输出轴;第一输出轴的两端分别装有第二卷筒,第二卷筒上卷有绳索,第二输出轴的两端分别装有输出齿轮。通过对前、后肢驱动机构和前、后肢执行机构的合理设置,提高了机器人驱动元件的利用率,优化了腿部机械结构,提高了机器人的仿生程度,增强了机器人的跳跃
仿青蛙跳跃机器人.pdf
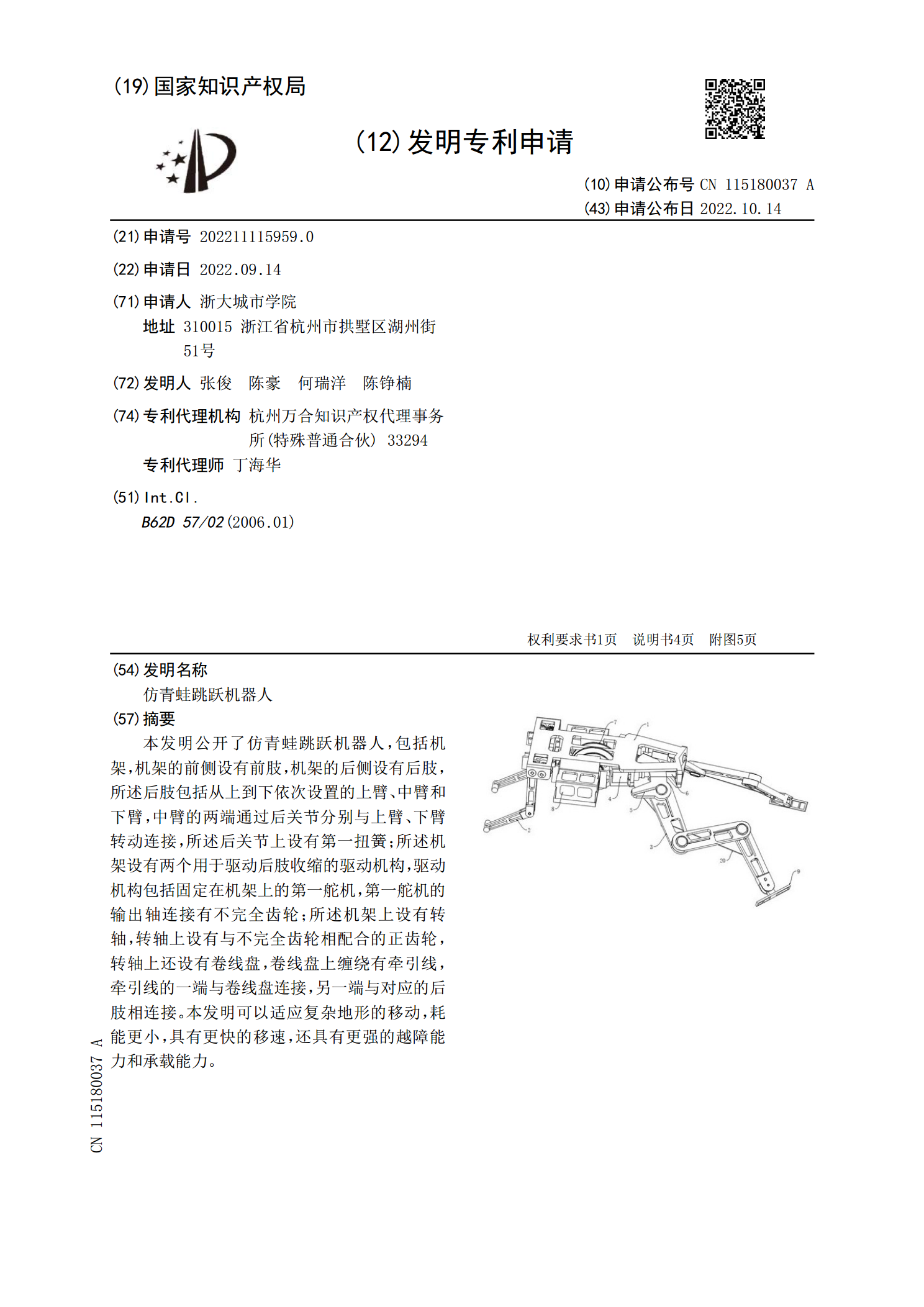
本发明公开了仿青蛙跳跃机器人,包括机架,机架的前侧设有前肢,机架的后侧设有后肢,所述后肢包括从上到下依次设置的上臂、中臂和下臂,中臂的两端通过后关节分别与上臂、下臂转动连接,所述后关节上设有第一扭簧;所述机架设有两个用于驱动后肢收缩的驱动机构,驱动机构包括固定在机架上的第一舵机,第一舵机的输出轴连接有不完全齿轮;所述机架上设有转轴,转轴上设有与不完全齿轮相配合的正齿轮,转轴上还设有卷线盘,卷线盘上缠绕有牵引线,牵引线的一端与卷线盘连接,另一端与对应的后肢相连接。本发明可以适应复杂地形的移动,耗能更小,具有

仿青蛙跳跃机器人的研制.docx
仿青蛙跳跃机器人的研制一、概述随着科技的不断进步,机器人技术已广泛应用于各个领域,从工业生产到医疗护理,从军事应用到日常生活,机器人的身影无处不在。仿生机器人作为机器人技术的一个重要分支,通过模仿生物体的结构和运动方式,以期实现更加灵活、高效的任务执行。仿青蛙跳跃机器人作为仿生机器人的一种,其独特的跳跃方式使其在复杂环境中的移动具有显著优势。仿青蛙跳跃机器人是一种模拟青蛙跳跃运动的机器人,它结合了生物学、机械工程学、控制理论等多个学科的知识。通过深入研究青蛙的跳跃机制,设计并制造出能够模拟青蛙跳跃动作的机
仿青蛙变体移动机器人的设计与实验pptx.pptx
仿青蛙变体移动机器人的设计与实验近年来,仿生机器人一直是前沿领域研究的热点。为了深入探索复杂的不可预测的环境,就有必要利用移动能力和环境适应能力强的机器人来代替人类执行任务。青蛙爆发性强,可以轻松越过障碍物或沟渠,并且水陆两栖的生物特性使其具备了超越很多生物的环境适应能力。因此本文基于对青蛙优异的两栖运动能力的研究,设计了一种可以实现陆地跳跃模式和水中蛙泳模式转换的双模式仿青蛙变体移动机器人设计。首先,设计适用于机器人两栖运动模式的跳跃执行机构、触发机构、复位机构、变体机构等可行有效的机构方案,并对其进行