
瑞利多普勒测风激光雷达的频率标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

瑞利多普勒测风激光雷达的频率标定方法.docx
瑞利多普勒测风激光雷达的频率标定方法瑞利多普勒测风激光雷达(WindLidar)是一种先进的风速和风向测量仪器,通过激光技术可以精确测量空气中的速度和方向。在大气科学、新能源、环境保护等领域都具有广泛的应用。而频率标定是判断激光发射器频率的准确性和稳定性的一项重要工作。本文将探讨瑞利多普勒测风激光雷达的频率标定方法。一、瑞利多普勒测风激光雷达原理简介瑞利多普勒测风激光雷达利用激光束穿过大气中的各种气体分子与杂质颗粒,利用涡旋切变相关(VCS)算法,得到大气中风速和风向等参数。涡旋切变相关算法是通过测量被风
多普勒测风激光雷达灵敏度标定系统及其标定方法.pdf
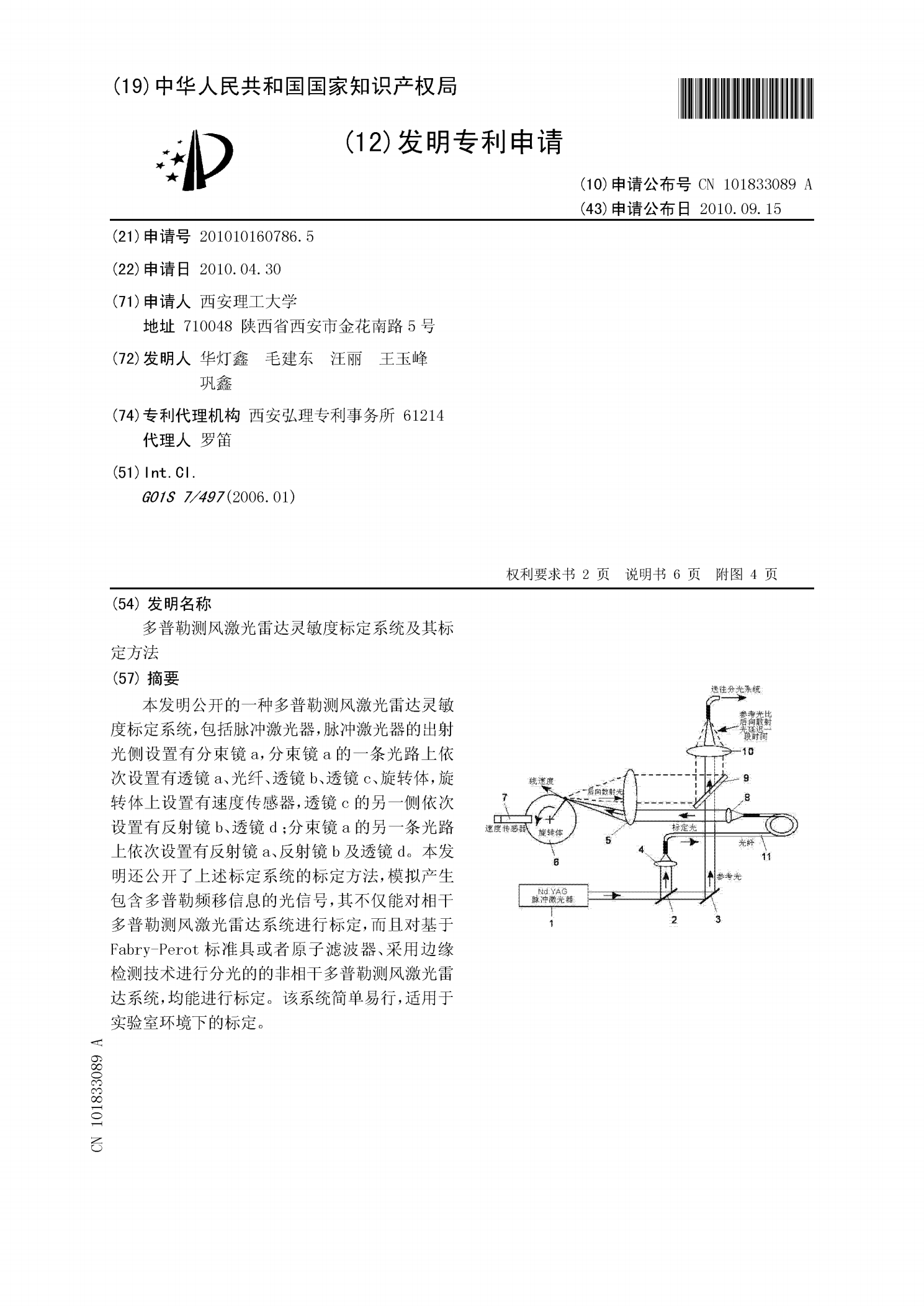
本发明公开的一种多普勒测风激光雷达灵敏度标定系统,包括脉冲激光器,脉冲激光器的出射光侧设置有分束镜a,分束镜a的一条光路上依次设置有透镜a、光纤、透镜b、透镜c、旋转体,旋转体上设置有速度传感器,透镜c的另一侧依次设置有反射镜b、透镜d;分束镜a的另一条光路上依次设置有反射镜a、反射镜b及透镜d。本发明还公开了上述标定系统的标定方法,模拟产生包含多普勒频移信息的光信号,其不仅能对相干多普勒测风激光雷达系统进行标定,而且对基于Fabry-Perot标准具或者原子滤波器、采用边缘检测技术进行分光的的非相干多普

瑞利散射多普勒激光雷达风场反演方法.docx
瑞利散射多普勒激光雷达风场反演方法瑞利散射多普勒激光雷达风场反演方法摘要:风场反演是一种常用的气象探测技术,能够提供大气中各个位置的风速和风向信息。本文将介绍一种基于瑞利散射多普勒激光雷达的风场反演方法。该方法利用激光雷达对大气中的微粒进行测量,并根据多普勒效应生成多普勒频移谱图。通过分析谱图可以获取大气中的风速和风向信息。本文将详细讨论这种风场反演方法的原理、技术难点和应用前景。关键词:瑞利散射,多普勒激光雷达,风场反演,多普勒频移谱图1.引言风是大气中不可忽视的一个因素,对气象研究和天气预报具有重要的

瑞利散射多普勒测风激光雷达系统误差分析.docx
瑞利散射多普勒测风激光雷达系统误差分析瑞利散射多普勒测风激光雷达系统是一种常用于大气环境监测以及风能开发利用的无接触式非侵入性测风技术。该技术通过激光束对气溶胶进行散射,测量风速的垂直分量,可以实现高空、高速、高分辨率的风速测量。然而,瑞利散射多普勒测风激光雷达系统存在着一定的误差,从而影响了测风精度。本文将从仪器误差、信号处理误差和大气条件误差三个方面进行分析。一、仪器误差1.雷达仪器发射能量稳定性误差激光雷达发射的能量稳定性是影响瑞利散射多普勒测风激光雷达系统测量误差的重要因素。由于激光器长期使用或者

相干多普勒测风激光雷达、方法和存储介质.pdf
本申请公开了一种相干多普勒测风激光雷达、方法和存储介质,所述相干多普勒测风激光雷达包括:激光器,用于发射激光;光纤分路器,用于分离激光,得到本振参考光和测量光;光纤接头,用于传输测量光至聚焦透镜;聚焦透镜,用于聚焦测量光于测量点,得到反射光;环形器,用于传输反射光至探测器;探测器,用于根据本振参考光和反射光生成拍频信号。本申请实施例相较于现有的测风激光雷达,由于采用本振参考光和测量光异路传播的方式,降低了测风激光雷达的元件精度要求,从而减少了测风激光雷达的成本。本申请可广泛应用于多普勒激光测风技术领域中。