
激光雷达探测及三维成像研究进展.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

激光雷达探测及三维成像研究进展.docx
激光雷达探测及三维成像研究进展激光雷达(Lidar)是一种主动光学遥感技术,能够高分辨率、高精度地进行地物探测和三维成像。随着科技的不断发展,激光雷达在各个领域的应用越来越广泛,尤其在自动驾驶、无人机、环境监测等方面具有巨大潜力。本文将从激光雷达的基本原理、探测技术、成像方法和应用研究等方面进行综述。一、激光雷达的基本原理激光雷达是利用激光器发射出的激光束,并通过接收器接收反射回来的激光信号来完成探测和成像的技术。激光雷达的工作原理可以简单分为三个步骤:1)激光发射:通过激光器发射出一束脉冲激光;2)激光
一种基于双单光子探测器的水下三维成像激光雷达装置.pdf
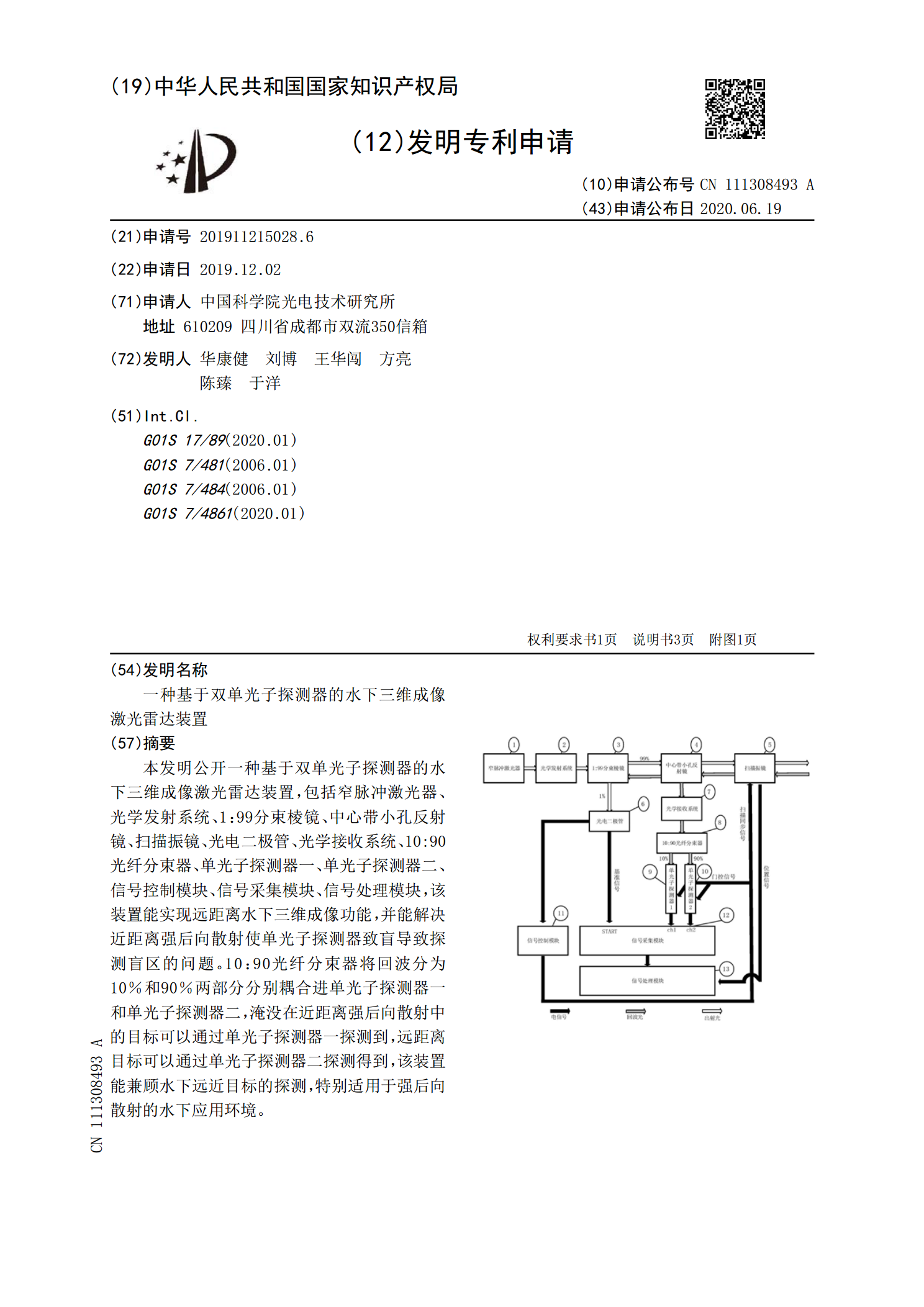
本发明公开一种基于双单光子探测器的水下三维成像激光雷达装置,包括窄脉冲激光器、光学发射系统、1:99分束棱镜、中心带小孔反射镜、扫描振镜、光电二极管、光学接收系统、10:90光纤分束器、单光子探测器一、单光子探测器二、信号控制模块、信号采集模块、信号处理模块,该装置能实现远距离水下三维成像功能,并能解决近距离强后向散射使单光子探测器致盲导致探测盲区的问题。10:90光纤分束器将回波分为10%和90%两部分分别耦合进单光子探测器一和单光子探测器二,淹没在近距离强后向散射中的目标可以通过单光子探测器一探测到,

无扫描三维成像激光雷达原理分析与成像仿真.docx
无扫描三维成像激光雷达原理分析与成像仿真摘要:无扫描三维成像激光雷达是一种新型雷达技术,其运行原理基于光学三角测量,能够高效地获取远距离目标的三维图像数据。本文首先介绍了无扫描三维成像激光雷达的基本原理和系统组成,然后对其成像仿真进行了详细分析和讨论。最后,通过实验结果验证了该技术的性能和应用效果。关键词:无扫描三维成像激光雷达、光学三角测量、成像仿真、性能验证一、引言随着雷达技术的不断发展,各种新型雷达应运而生,无扫描三维成像激光雷达就是其中之一。该技术被广泛应用于测量、导航、自动驾驶和机器视觉等领域,

基于Gm-APD的成像激光雷达目标探测特性.docx
基于Gm-APD的成像激光雷达目标探测特性基于Gm-APD的成像激光雷达目标探测特性的论文摘要:激光雷达作为一种高精度、高分辨率的目标探测技术,近年来得到了广泛应用。其中,基于Gm-APD(GeigerModeAvalanchePhotodiode)的成像激光雷达在目标探测方面具有独特的性能优势。本文主要介绍了基于Gm-APD的成像激光雷达目标探测特性的研究进展,包括激光雷达原理、Gm-APD的工作机理以及Gm-APD在成像激光雷达中的应用等方面。通过对国内外研究成果的综述分析,总结了Gm-APD成像激光

基于面阵探测器的凝视成像激光雷达.docx
基于面阵探测器的凝视成像激光雷达随着自动驾驶、机器人、无人机等应用市场的快速发展,激光雷达成为了一个重要的感知器件。其中,凝视成像激光雷达因其对空间分辨率的高要求以及可对杂波进行有效抑制等优势被广泛关注。本文将介绍基于面阵探测器的凝视成像激光雷达的基本原理、设计方法以及应用前景。一、基本原理1.1凝视成像激光雷达的概述凝视成像激光雷达是一种将光束通过橄榄球形透镜或其它形状透镜聚焦到目标上,将反射光通过面阵探测器采集成图像的一种激光雷达。与传统的扫描式激光雷达不同,凝视成像激光雷达可以同时获取多个目标的三维