
水平井爬行器中电永磁吸盘的设计与优化.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水平井爬行器中电永磁吸盘的设计与优化.docx
水平井爬行器中电永磁吸盘的设计与优化设计与优化水平井爬行器中的电永磁吸盘摘要:水平井爬行器是一种用于在水平井道中运输设备或完成特定任务的机器人。在设计中,电永磁吸盘是一个重要的组件,能够提供稳定的吸附力并实现可靠的运动。本文将讨论电永磁吸盘的设计原理、结构优化以及相关的挑战和解决方案。1.引言水平井作为一种重要的石油开采和地下勘探方式,需要使用各种机器人来完成不同的任务,如巡检、清理和修理等。水平井爬行器作为其中的一种机器人,需要具备良好的移动性能和稳定的吸附力,并且要能够适应不同的地面条件和环境。2.电

智能电永磁吸盘.pdf
本发明公开了一种智能电永磁吸盘,在模板上设置若干个盲模孔,盲模孔之间的通过模壁隔开,模壁顶部设有引线缺口,每个盲模孔底部中间设有与模板连为一体凸起的柱体,柱体与盲模孔模壁之间形成有环绕柱体的环绕槽,盲模孔结构简单、安装磁感元件时,按顺序放入环绕槽即可,环绕槽能快速校对整齐钕铁硼圈,钕铁硼圈由若干块扇形钕铁硼件相互连接围成一个整体钕铁硼圈,每块钕铁硼圈的外部为N极,内部为S极,在产生磁力或减弱磁力或增加磁力时,每块钕铁硼圈单独工作,相互之间磁场不干扰,磁场分组不混乱,磁场呈垂直循环的释放及回收,大大提高磁吸

水平井开发测井中的Sondex爬行器应用.docx
水平井开发测井中的Sondex爬行器应用随着现代化石油开采技术的不断进步,水平井的开发越来越成为了油田开发的重要手段之一。水平井与传统的垂直井相比,具有生产能力强、裸眼裸管生产能力高、对地层层次要求低等优点。而在水平井的开发中,测井技术被广泛应用,尤其是Sondex爬行器在水平井测井中发挥了不可替代的作用。Sondex爬行器是一种模块化、具有多功能的测井工具,是切向电阻测量测井工具的组成部分,可以完成水平井内各种参数的测量、记录和传递。Sondex爬行器系统包括爬行器、数据采集仪和数据处理系统三部分。在水
智能电永磁吸盘的磁力检测装置.pdf
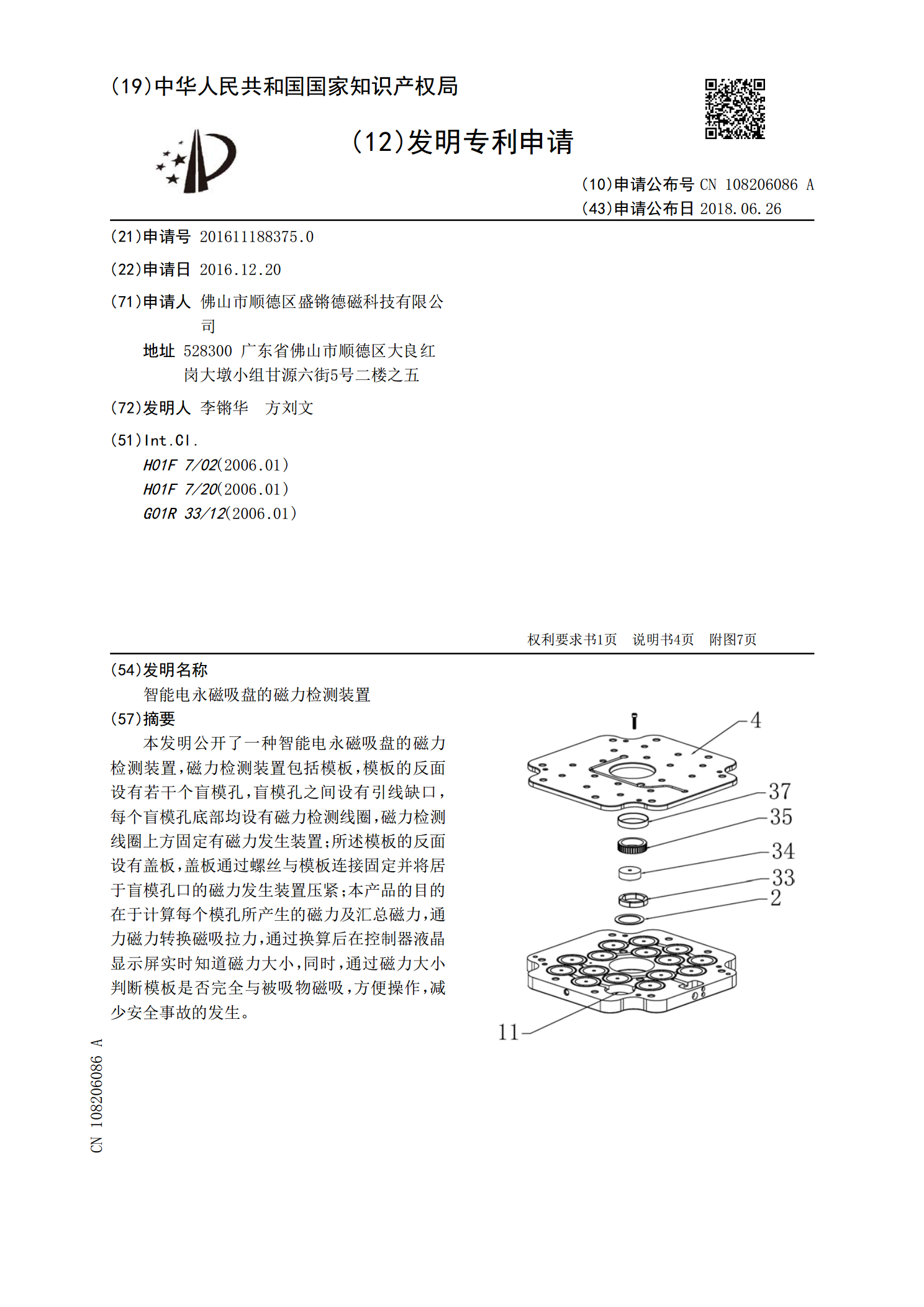
本发明公开了一种智能电永磁吸盘的磁力检测装置,磁力检测装置包括模板,模板的反面设有若干个盲模孔,盲模孔之间设有引线缺口,每个盲模孔底部均设有磁力检测线圈,磁力检测线圈上方固定有磁力发生装置;所述模板的反面设有盖板,盖板通过螺丝与模板连接固定并将居于盲模孔口的磁力发生装置压紧;本产品的目的在于计算每个模孔所产生的磁力及汇总磁力,通力磁力转换磁吸拉力,通过换算后在控制器液晶显示屏实时知道磁力大小,同时,通过磁力大小判断模板是否完全与被吸物磁吸,方便操作,减少安全事故的发生。

电控永磁吸盘控制器的研究.docx
电控永磁吸盘控制器的研究电控永磁吸盘控制器的研究摘要:随着科技的不断发展和进步,电控永磁吸盘控制器作为一种重要的控制设备在工业领域得到了广泛的应用。本论文通过对电控永磁吸盘控制器的研究,对其工作原理、控制方法和应用前景进行了详细的分析和讨论。本研究旨在为相关领域的人员提供参考,以促进电控永磁吸盘控制器的进一步发展和应用。关键词:电控永磁吸盘;控制器;工作原理;控制方法;应用前景第1章引言1.1研究背景随着全球工业的不断发展,对于高效、自动化的生产方式的需求也越来越高。电控永磁吸盘控制器作为一种重要的控制设