
水下通信约束对无人航行器控制影响研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

水下通信约束对无人航行器控制影响研究.docx
水下通信约束对无人航行器控制影响研究随着科技的不断发展,无人机和无人航行器的应用范围也不断扩大。然而,这些设备在海洋中的应用,受到了复杂的水下环境的限制。水下环境与空气环境不同,水下环境中水分子的散射和吸收对声波传输的影响非常大,这就使得水下通信的频带很有限,数据传输的速度也不如陆地和空中的通信。因此,水下通信约束对无人航行器的控制和应用产生了影响。一、无人航行器的控制系统及其应用情况无人航行器作为一种新型无人机,具有强大的自主能力和高效的作业能力,在海洋探测、水下搜救、海洋资源勘探等领域应用广泛,它的应

无人水下航行器控制技术研究.pptx
,CONTENTS01.02.定义与分类国内外研究现状技术难点与挑战03.硬件架构软件架构通信协议04.惯性导航卫星导航声纳导航组合导航05.推进器控制姿态控制深度控制速度控制06.避障算法目标追踪算法多航行器协同追踪算法优化与实现07.军事应用民用应用技术发展趋势与展望感谢您的观看!
水下无人航行器主动对接装置及水下无人航行器.pdf
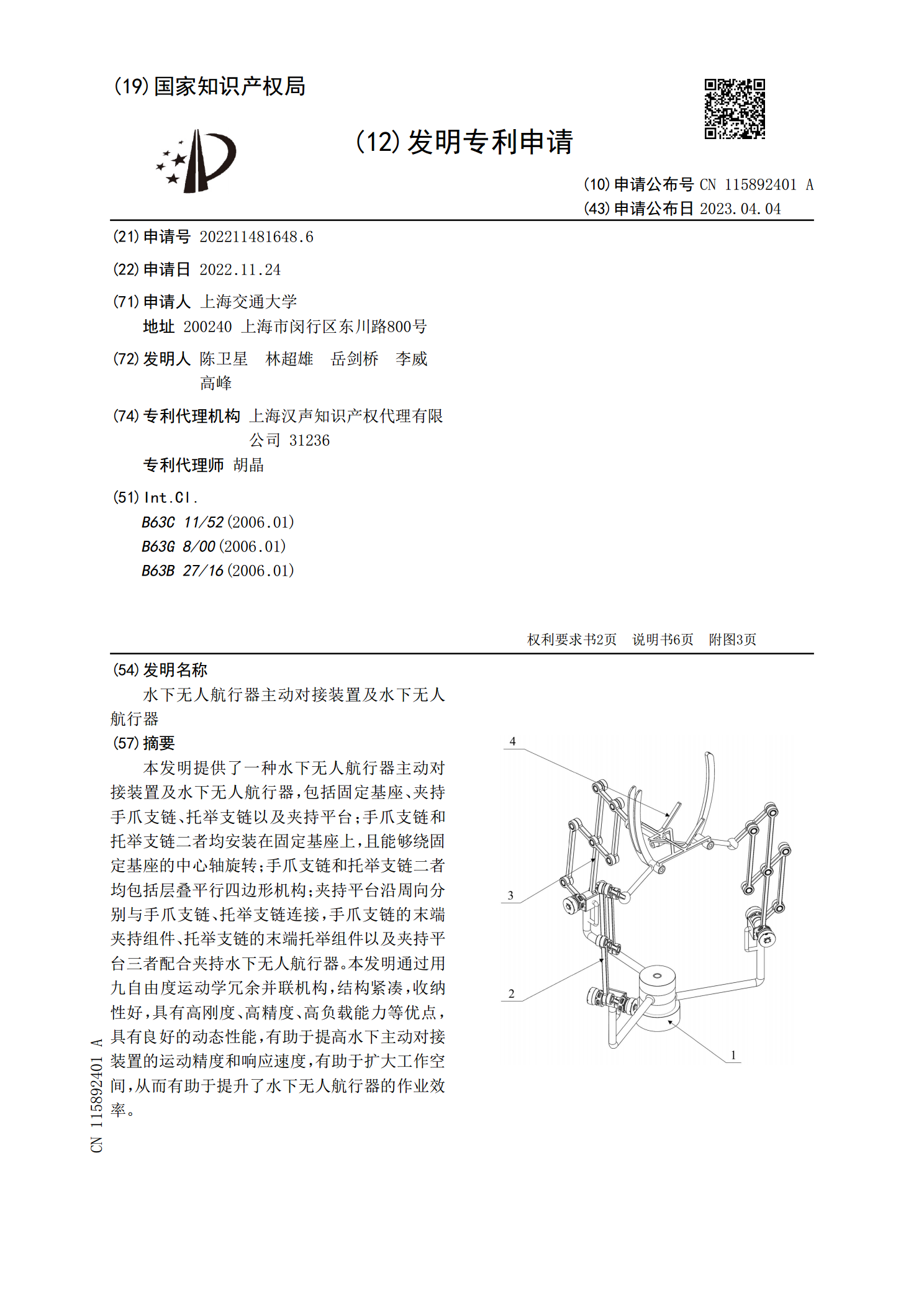
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动

无人水下航行器控制系统CAN总线通信设计与仿真研究.docx
无人水下航行器控制系统CAN总线通信设计与仿真研究无人水下航行器的控制系统是实现其航行和任务执行的核心,而CAN(ControllerAreaNetwork)总线通信技术被广泛应用于各种自动化控制系统中。本文将探讨无人水下航行器控制系统中CAN总线通信的设计与仿真研究。首先,通过对无人水下航行器控制系统的功能和需求进行分析,确定了使用CAN总线通信技术的必要性。CAN总线通信具有高可靠性、高实时性和抗干扰能力强的特点,非常适用于水下环境中的控制系统。接下来,本文将对无人水下航行器的控制系统进行设计。首先,

基于增强学习的水下无人航行器控制方法研究.docx
基于增强学习的水下无人航行器控制方法研究基于增强学习的水下无人航行器控制方法研究摘要:随着科技的发展,水下无人航行器在水下勘查、海底资源开发和海洋生态环境监测方面发挥了重要的作用。然而,传统的水下航行器控制方法存在着许多问题,如在复杂的环境中难以实现精确的控制和适应性的调整。因此,基于增强学习的水下无人航行器控制方法应运而生。本文将重点研究基于增强学习的水下无人航行器控制方法,并分析其在实际应用中的潜力和挑战。关键词:水下无人航行器、增强学习、控制方法、潜力、挑战1.引言水下无人航行器作为一种重要的海洋探