
推靠式旋转导向系统推力变化平缓的控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

推靠式旋转导向系统推力变化平缓的控制方法.docx
推靠式旋转导向系统推力变化平缓的控制方法引言推力变化平缓的控制方法在航空、导航、船舶和汽车等领域得到广泛应用。在推力变化过程中,如何保证系统具有稳定性和控制性能是降低系统动态特性和实现高精度控制的重要问题。推靠式旋转导向系统是一种航天器姿态控制系统,它通常用于控制航天器的俯仰和偏航。该系统的基本原理是通过推力向量的定量控制来实现航天器的变向和角动量控制。这种设计有助于降低整个系统的质量,提高航天器的稳定性和控制性能。然而,燃料喷射的变化可能会导致推力不稳定和航天器的不稳定,影响系统的性能。本文旨在研究推靠

推靠式旋转导向井眼轨迹预测与控制方法.docx
推靠式旋转导向井眼轨迹预测与控制方法一、研究背景随着石油勘探的深入和技术的进步,油田开发越来越倾向于复杂井型和高难度井眼设计,如水平井、多级水平井、S型井等等,导向井眼轨迹控制问题显得尤为重要。传统的斜井钻井方法无法满足复杂条件下的井眼轨迹控制,需要采用新的井钻技术来解决井眼轨迹控制问题。推靠式导向井钻技术是一种非常有效的控制井眼轨迹的方法,在实际应用中取得了良好的效果。二、推靠式导向井钻技术的原理推靠式导向井钻技术主要是通过旋转穿过推力来控制井眼轨迹。一个齿轮马达通过螺旋齿轮传动装置的作用产生推力,在钻
推靠式全旋转导向工具.pdf
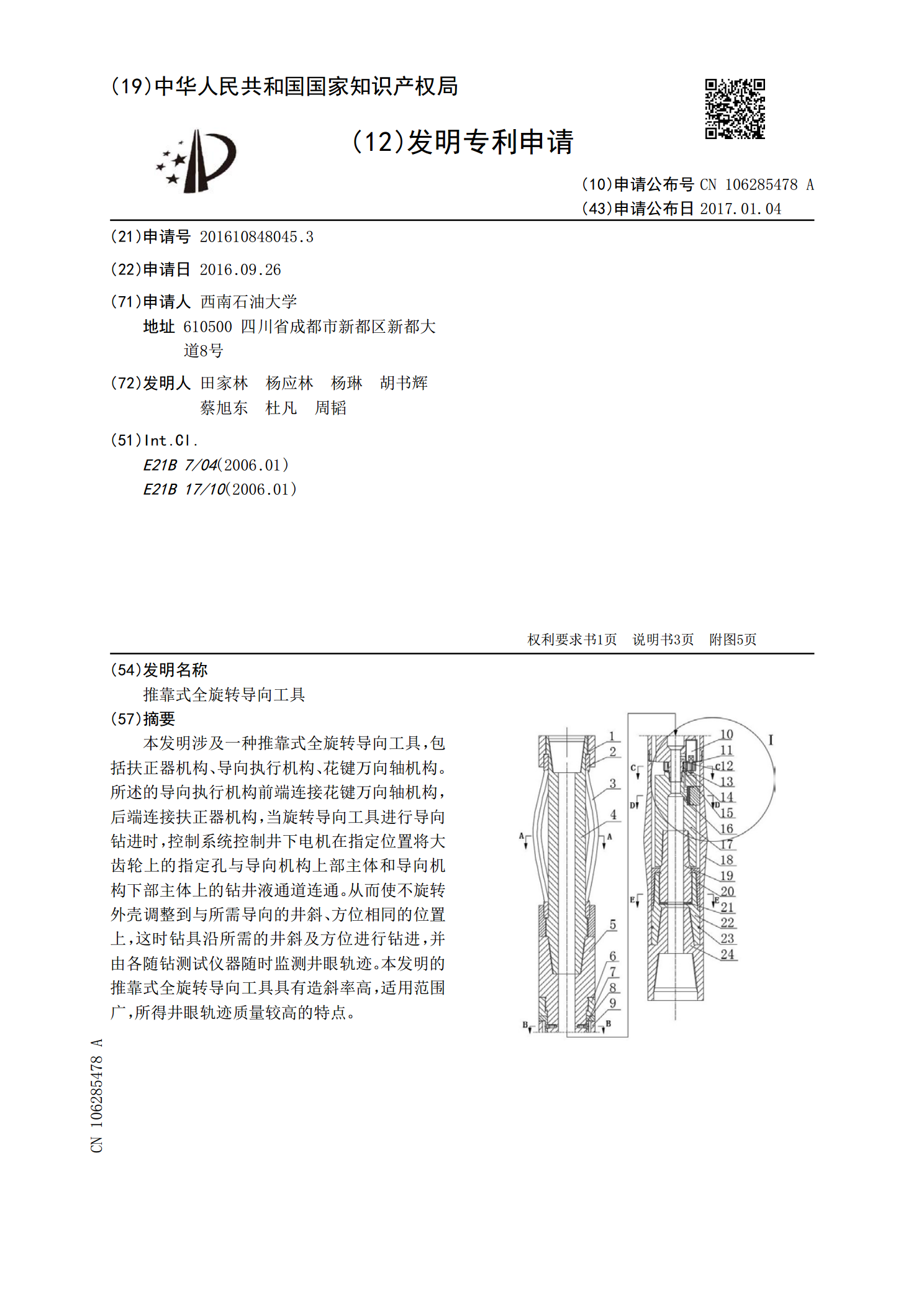
本发明涉及一种推靠式全旋转导向工具,包括扶正器机构、导向执行机构、花键万向轴机构。所述的导向执行机构前端连接花键万向轴机构,后端连接扶正器机构,当旋转导向工具进行导向钻进时,控制系统控制井下电机在指定位置将大齿轮上的指定孔与导向机构上部主体和导向机构下部主体上的钻井液通道连通。从而使不旋转外壳调整到与所需导向的井斜、方位相同的位置上,这时钻具沿所需的井斜及方位进行钻进,并由各随钻测试仪器随时监测井眼轨迹。本发明的推靠式全旋转导向工具具有造斜率高,适用范围广,所得井眼轨迹质量较高的特点。
一种推靠式旋转导向工具.pdf
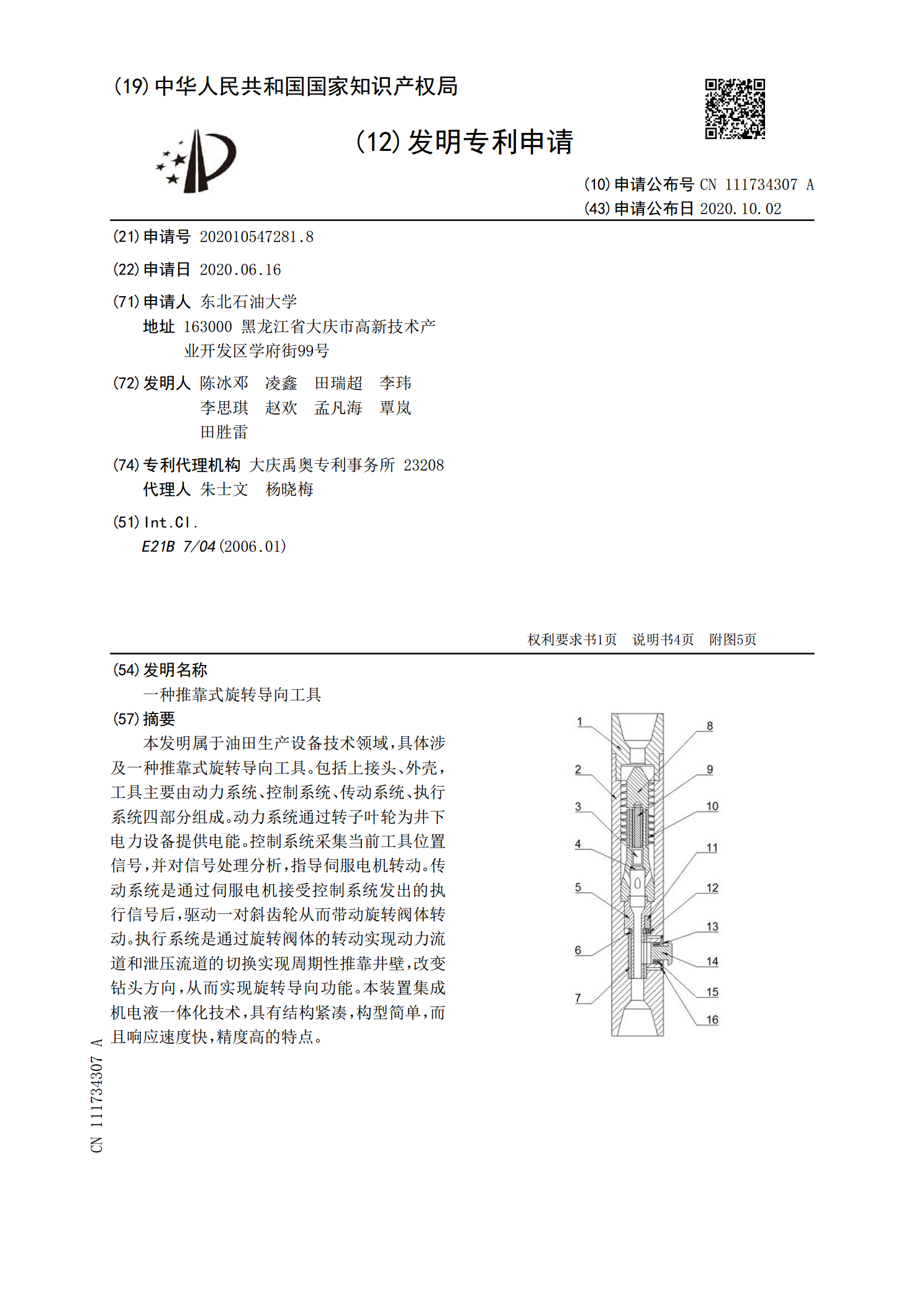
本发明属于油田生产设备技术领域,具体涉及一种推靠式旋转导向工具。包括上接头、外壳,工具主要由动力系统、控制系统、传动系统、执行系统四部分组成。动力系统通过转子叶轮为井下电力设备提供电能。控制系统采集当前工具位置信号,并对信号处理分析,指导伺服电机转动。传动系统是通过伺服电机接受控制系统发出的执行信号后,驱动一对斜齿轮从而带动旋转阀体转动。执行系统是通过旋转阀体的转动实现动力流道和泄压流道的切换实现周期性推靠井壁,改变钻头方向,从而实现旋转导向功能。本装置集成机电液一体化技术,具有结构紧凑,构型简单,而且响
一种全旋转液压内推靠式高造斜率旋转导向工具.pdf
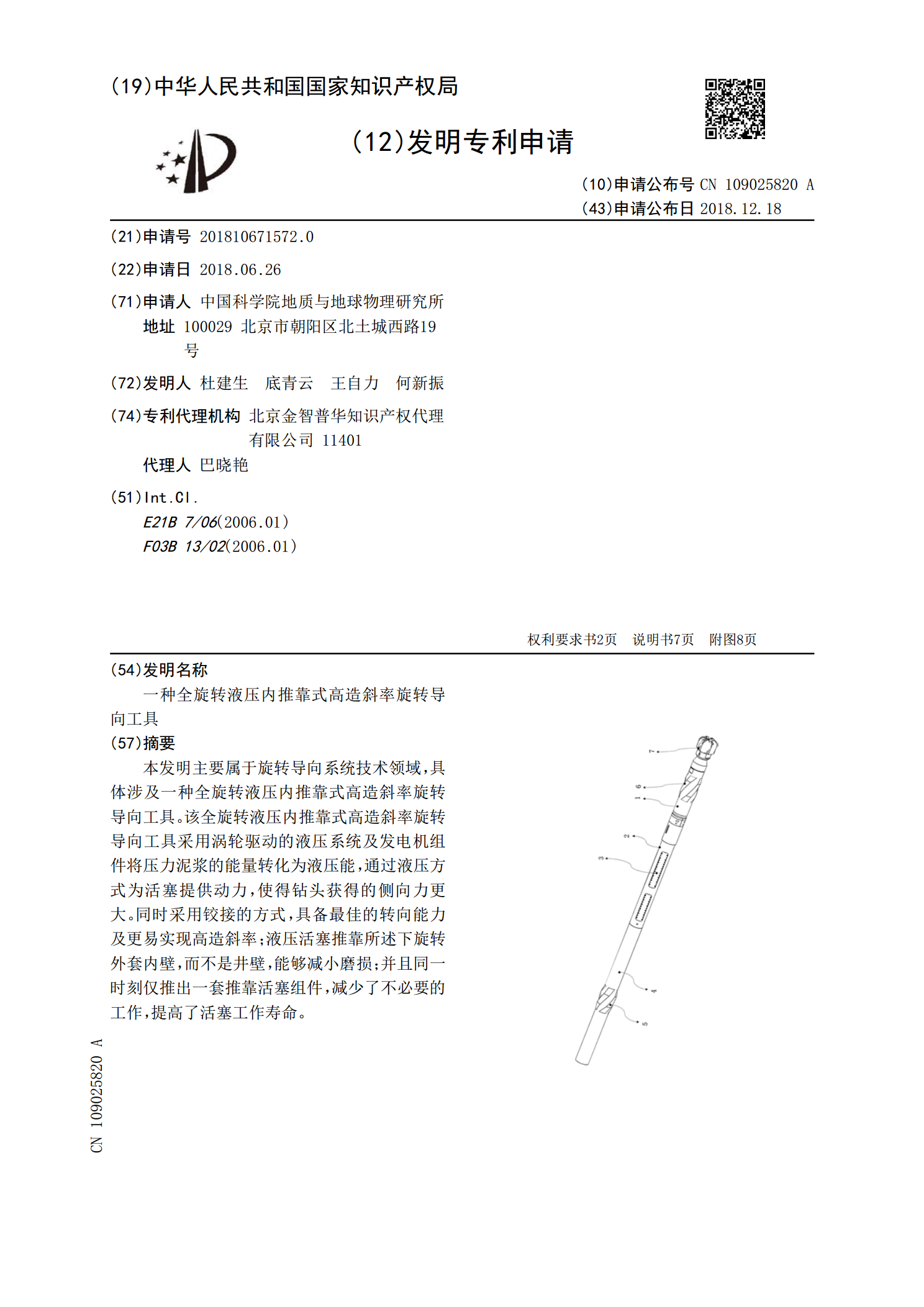
本发明主要属于旋转导向系统技术领域,具体涉及一种全旋转液压内推靠式高造斜率旋转导向工具。该全旋转液压内推靠式高造斜率旋转导向工具采用涡轮驱动的液压系统及发电机组件将压力泥浆的能量转化为液压能,通过液压方式为活塞提供动力,使得钻头获得的侧向力更大。同时采用铰接的方式,具备最佳的转向能力及更易实现高造斜率;液压活塞推靠所述下旋转外套内壁,而不是井壁,能够减小磨损;并且同一时刻仅推出一套推靠活塞组件,减少了不必要的工作,提高了活塞工作寿命。