
星敏感器辅助的捷联光纤航姿误差在线估计方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

星敏感器辅助的捷联光纤航姿误差在线估计方法研究.docx
星敏感器辅助的捷联光纤航姿误差在线估计方法研究近年来,随着航空航天技术的不断发展,对于捷联光纤技术的应用越来越广泛。其中,星敏感器是一种常用于航姿控制系统中的传感器,可用于测量飞行器的方向和角速度。其他的惯性测量单元(IMU)传感器也可用于飞行器的运动测量,但精度不足以满足高精度导航和控制的要求。因此,星敏感器被广泛应用于精准姿态测量,特别是在卫星、飞机和导弹方向控制中。然而,星敏感器通常仅提供方向和角速度等姿态信息,难以为姿态控制系统提供完整的姿态控制反馈,特别是在复杂的飞行环境中。为了解决这个问题,需

基于纵向滤波的星敏感器低频误差在线估计.docx
基于纵向滤波的星敏感器低频误差在线估计基于纵向滤波的星敏感器低频误差在线估计摘要:星敏感器广泛应用于卫星姿态控制系统中,能够实时监测和测量卫星姿态,是确保卫星稳定运行的重要设备。然而,星敏感器的低频误差对卫星姿态控制具有较大影响,因此在实际应用中需要对低频误差进行估计和补偿。本文提出了一种基于纵向滤波的星敏感器低频误差在线估计方法,通过对星敏感器输出数据进行滤波处理,得到低频误差模型,并利用卡尔曼滤波器对低频误差进行在线估计。仿真结果表明,该方法能够有效减小星敏感器的低频误差,提高卫星姿态控制的精度和稳定
基于MBSE模型的机载光纤捷联航姿系统的设计方法.pdf
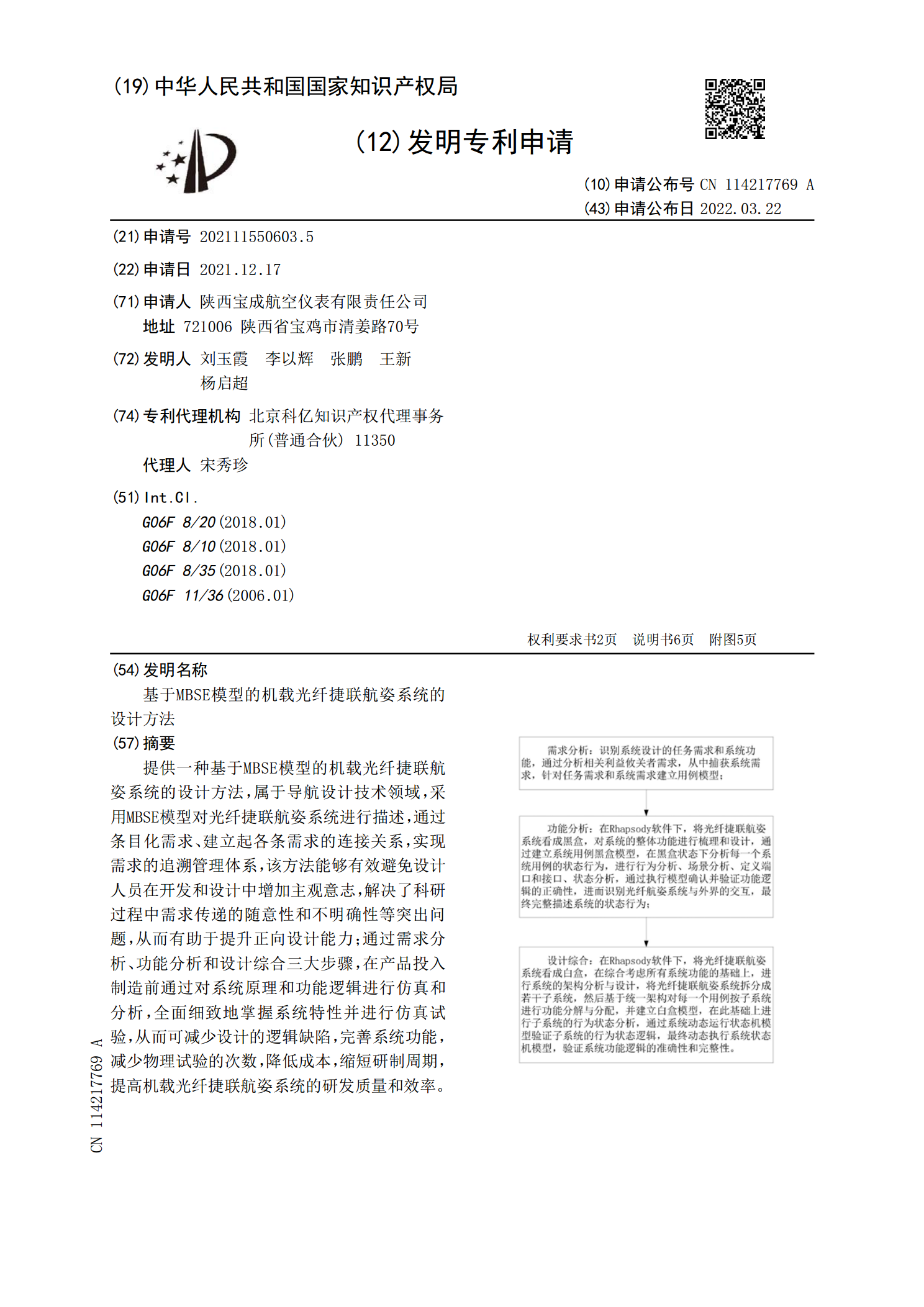
提供一种基于MBSE模型的机载光纤捷联航姿系统的设计方法,属于导航设计技术领域,采用MBSE模型对光纤捷联航姿系统进行描述,通过条目化需求、建立起各条需求的连接关系,实现需求的追溯管理体系,该方法能够有效避免设计人员在开发和设计中增加主观意志,解决了科研过程中需求传递的随意性和不明确性等突出问题,从而有助于提升正向设计能力;通过需求分析、功能分析和设计综合三大步骤,在产品投入制造前通过对系统原理和功能逻辑进行仿真和分析,全面细致地掌握系统特性并进行仿真试验,从而可减少设计的逻辑缺陷,完善系统功能,减少物理

光纤陀螺仪建模技术及捷联航姿算法研究的任务书.docx
光纤陀螺仪建模技术及捷联航姿算法研究的任务书任务书一、任务背景作为航空航天等领域中的重要技术之一,航姿控制技术在飞行器的稳定性、控制精度等方面起着至关重要的作用,其中光纤陀螺仪被广泛应用于航姿控制系统中。而光纤陀螺仪建模技术及捷联航姿算法研究是目前该领域中研究难点之一,因此进行相关研究具有重要意义。二、研究内容本研究的主要内容包括光纤陀螺仪建模技术和捷联航姿算法研究两部分,具体内容如下:1.光纤陀螺仪建模技术研究光纤陀螺仪是一种基于光学原理的高精度陀螺仪,广泛应用于各种控制系统中。本研究将着重研究光纤陀螺

基于星像位置误差估计星敏感器姿态角偏差的方法.pptx
汇报人:CONTENTS星敏感器姿态角偏差估计方法星像位置误差的来源星敏感器姿态角偏差的估计方法估计方法的精度分析基于星像位置误差的姿态角偏差估计星像位置误差的测量姿态角偏差的估计估计结果的验证姿态角偏差对星敏感器性能的影响姿态角偏差对星敏感器定位精度的影响姿态角偏差对星敏感器稳定性的影响姿态角偏差对星敏感器测量精度的影响姿态角偏差的补偿方法基于硬件的补偿方法基于软件的补偿方法补偿方法的比较与选择姿态角偏差估计与补偿的应用前景在卫星导航系统中的应用前景在航天器自主导航中的应用前景在深空探测中的应用前景汇报