
基于蓝牙控制的循迹智能小车的设计与研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于蓝牙控制的循迹智能小车的设计与研究.docx
基于蓝牙控制的循迹智能小车的设计与研究现代社会的快速发展带来了各种各样的科技创新,智能化已经成为了人们日常生活中必不可少的一部分。在机器人领域,循迹智能小车是一个备受关注的研究方向,它可以利用现代化技术实现出色的控制效果和精准的定位功能。本文就是基于该背景,探讨了一种基于蓝牙控制的循迹智能小车的设计,旨在为科技创新提供一些有用的思路。一、循迹智能小车的概念循迹智能小车是一种自主行驶的机器人,它可以根据路线和目标进行移动,并保持一定的稳定性和准确性,实现各种复杂的任务需求。它通常包含多个传感器和执行机构,比

基于蓝牙监控的智能循迹运输小车设计.pptx
基于蓝牙监控的智能循迹运输小车设计目录添加目录项标题智能循迹运输小车的总体设计蓝牙监控系统设计智能循迹系统设计运输小车结构及外观设计安全性与稳定性考虑蓝牙监控系统实现蓝牙模块选择与连接监控界面设计数据传输与处理实时监控功能实现智能循迹系统实现传感器选择与布局路径识别算法实现自动循迹功能实现应对复杂路况策略运输小车结构及外观设计材料选择与结构设计驱动系统设计载重能力评估人性化外观设计安全性与稳定性考虑防撞与避障功能设计电源管理系统设计异常处理与故障诊断长期稳定性测试与优化感谢观看
一种基于蓝牙控制的智能循迹小车.pdf
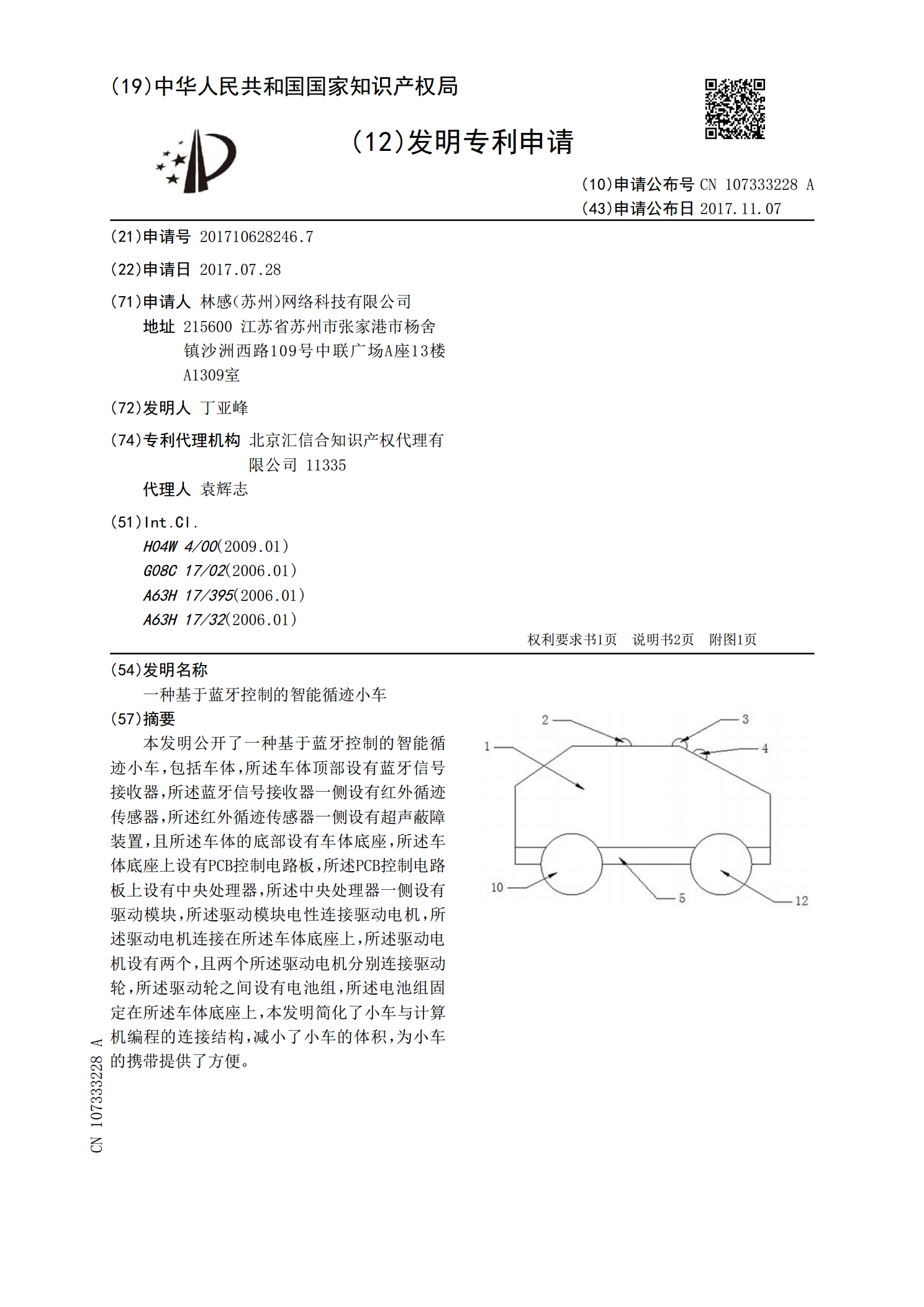
本发明公开了一种基于蓝牙控制的智能循迹小车,包括车体,所述车体顶部设有蓝牙信号接收器,所述蓝牙信号接收器一侧设有红外循迹传感器,所述红外循迹传感器一侧设有超声蔽障装置,且所述车体的底部设有车体底座,所述车体底座上设有PCB控制电路板,所述PCB控制电路板上设有中央处理器,所述中央处理器一侧设有驱动模块,所述驱动模块电性连接驱动电机,所述驱动电机连接在所述车体底座上,所述驱动电机设有两个,且两个所述驱动电机分别连接驱动轮,所述驱动轮之间设有电池组,所述电池组固定在所述车体底座上,本发明简化了小车与计算机编程

基于蓝牙控制的智能小车设计.docx
基于蓝牙控制的智能小车设计随着物联网技术的发展,各种智能设备开始进入人们的生活中,低功耗蓝牙技术由于其低功耗、成本低廉、易于实现等优势越来越受到关注,它被广泛用于智能家居、智能健康等领域。本文以基于蓝牙控制的智能小车设计为例,探讨蓝牙技术在智能设备中的应用及其优势。一、产品概述基于蓝牙控制的智能小车是一款通过蓝牙技术实现控制的智能玩具。该小车采用超声波避障技术、红外线测距技术和电机控制技术,能够自动避障、巡线并实现远距离控制。在设计中,我们通过STM32F103C8T6芯片控制整个系统,通过蓝牙模块HC-

基于Arduino的智能循迹小车设计.docx
基于Arduino的智能循迹小车设计李文龙+孙伟峰摘要:随着全球进入信息化,科技化。智能循迹小车,作为科技创新中比较入门级的一个作品,由于其原理较为简单,实现起来不是特别困难,常常作为高校中比赛或练习的一种形式,它可以利用前端的四个红外装置对地面的黑色胶带进行识别,将信息传回Arduino进行分析后,将不同大小的电流输送给电机驱动,实现直行或者差速转弯,从而实现智能循迹。本文通过对基于Arduino的智能循迹小车设计制作以及技术原理进行分析,并探讨其在实际生活中的应用。关键词:智能循迹;Arduino;红