
基于模糊PID算法的盾构机土压平衡控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于模糊PID算法的盾构机土压平衡控制研究.docx
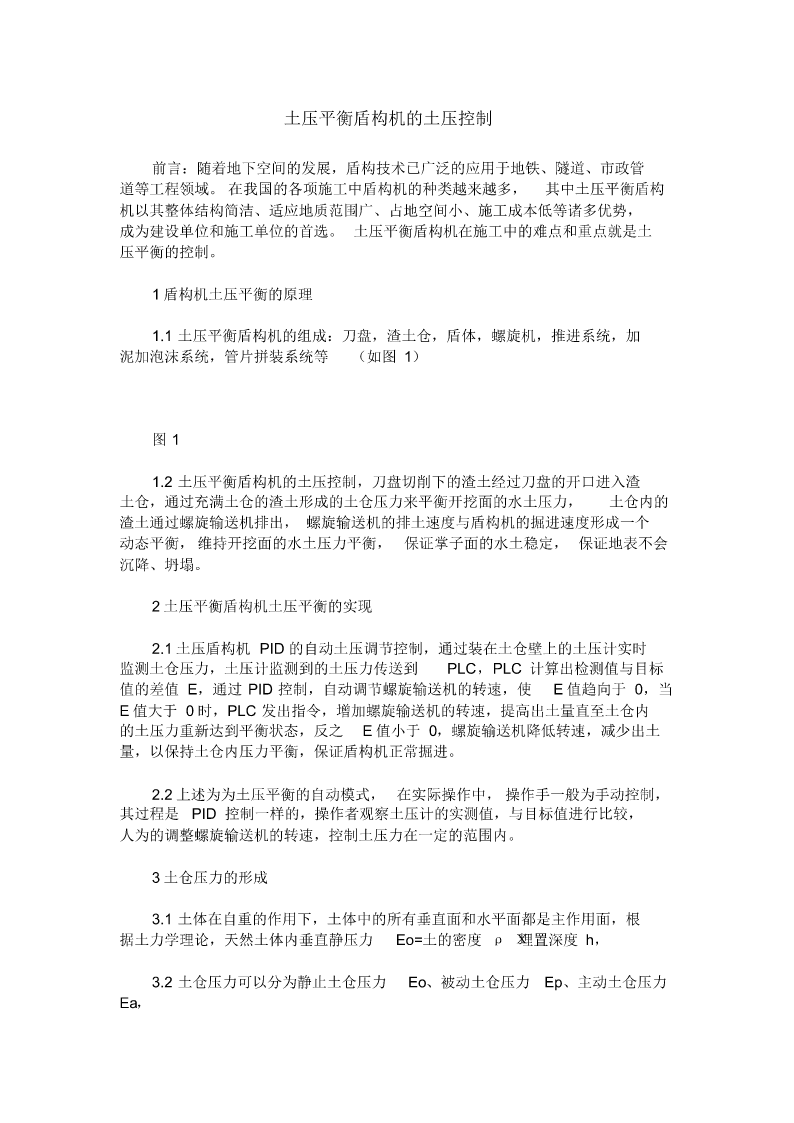
基于模糊PID算法的盾构机土压平衡控制研究随着城市化进程的不断推进,越来越多的地下工程需要完成,盾构机成为了其中不可或缺的重要设备。土压平衡控制是盾构机运行中必须解决的难题之一,如何合理高效地进行土压平衡控制成为了盾构机行业研究的热点之一。基于模糊PID算法的盾构机土压平衡控制研究成为了当前研究的重要方向之一。一、盾构机土压平衡控制的原理盾构机施工时,需要对土壤的封闭特性进行控制,以避免沿着推进方向堆积,从而影响推进质量。在推进过程中,盾构机外壳与管片被紧贴在掘进口周围的土壤面上,形成一定的土压力。为了保

基于模糊PID的盾构土仓压力控制研究.docx
基于模糊PID的盾构土仓压力控制研究随着城市化进程的不断加速,地下管线建设日益重要,而盾构机是地下管线建设的重要设备之一。在盾构机运行中,土仓压力的控制是十分关键的一个环节。因此,本文研究了基于模糊PID的盾构土仓压力控制方法,并对其进行了理论分析和实验验证。一、研究背景及意义随着城市化进程的加速,地下空间越来越被人们所利用,例如地下商场、地下停车场、地下管线等。而在地下管线建设过程中,盾构机作为一种高效、快速的施工设备,逐渐成为了主要的施工手段之一。而盾构机的一大特点就是需要控制好土仓压力,从而保证施工
土压平衡盾构机的土压控制.pdf
土压平衡盾构机的土压计算.pdf

土压平衡盾构机的土压计算.doc
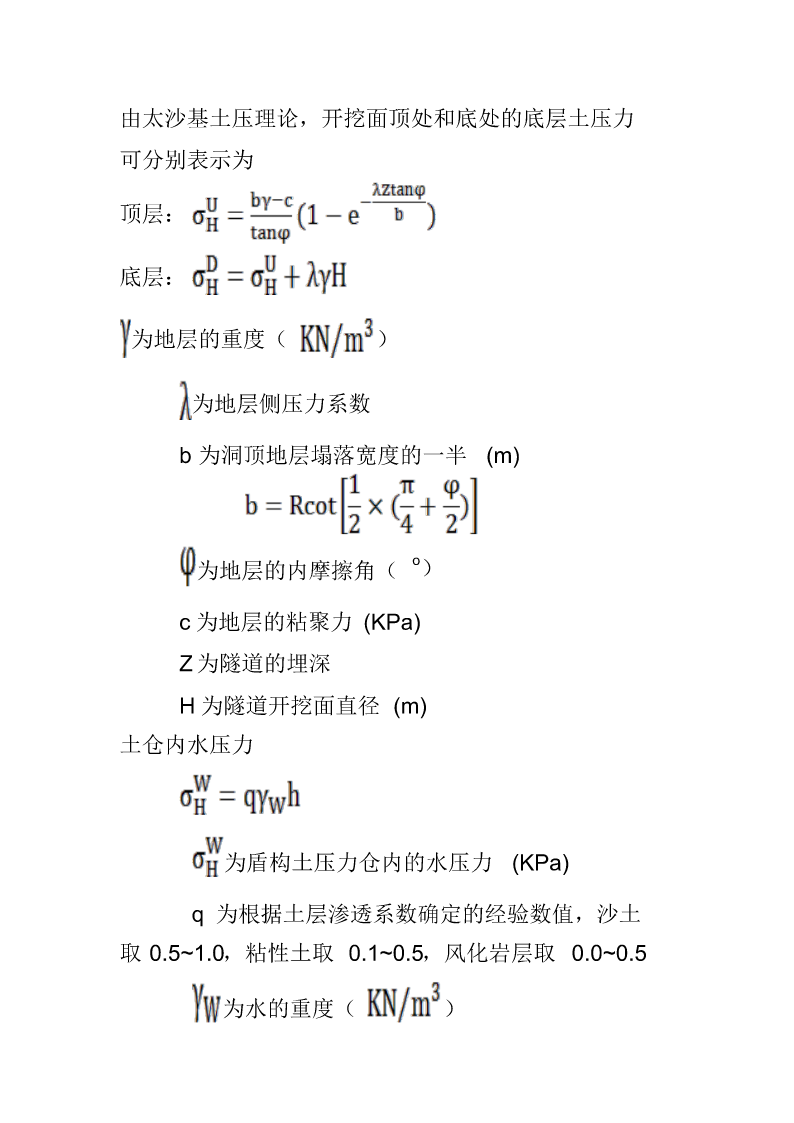
由太沙基土压理论,开挖面顶处和底处的底层土压力可分别表示为顶层:底层:为地层的重度()为地层侧压力系数b为洞顶地层塌落宽度的一半(m)为地层的内摩擦角(o)c为地层的粘聚力(KPa)Z为隧道的埋深H为隧道开挖面直径(m)土仓内水压力为盾构土压力仓内的水压力(KPa)q为根据土层渗透系数确定的经验数值,沙土取0.5~1.0,粘性土取0.1~0.5,风化岩层取0.0~0.5为水的重度()h为地下水位距刀盘底部的高度(m)实际设定土压