
一种模块化大力矩空间机械臂关节.pdf

桂香****盟主


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种模块化大力矩空间机械臂关节.pdf
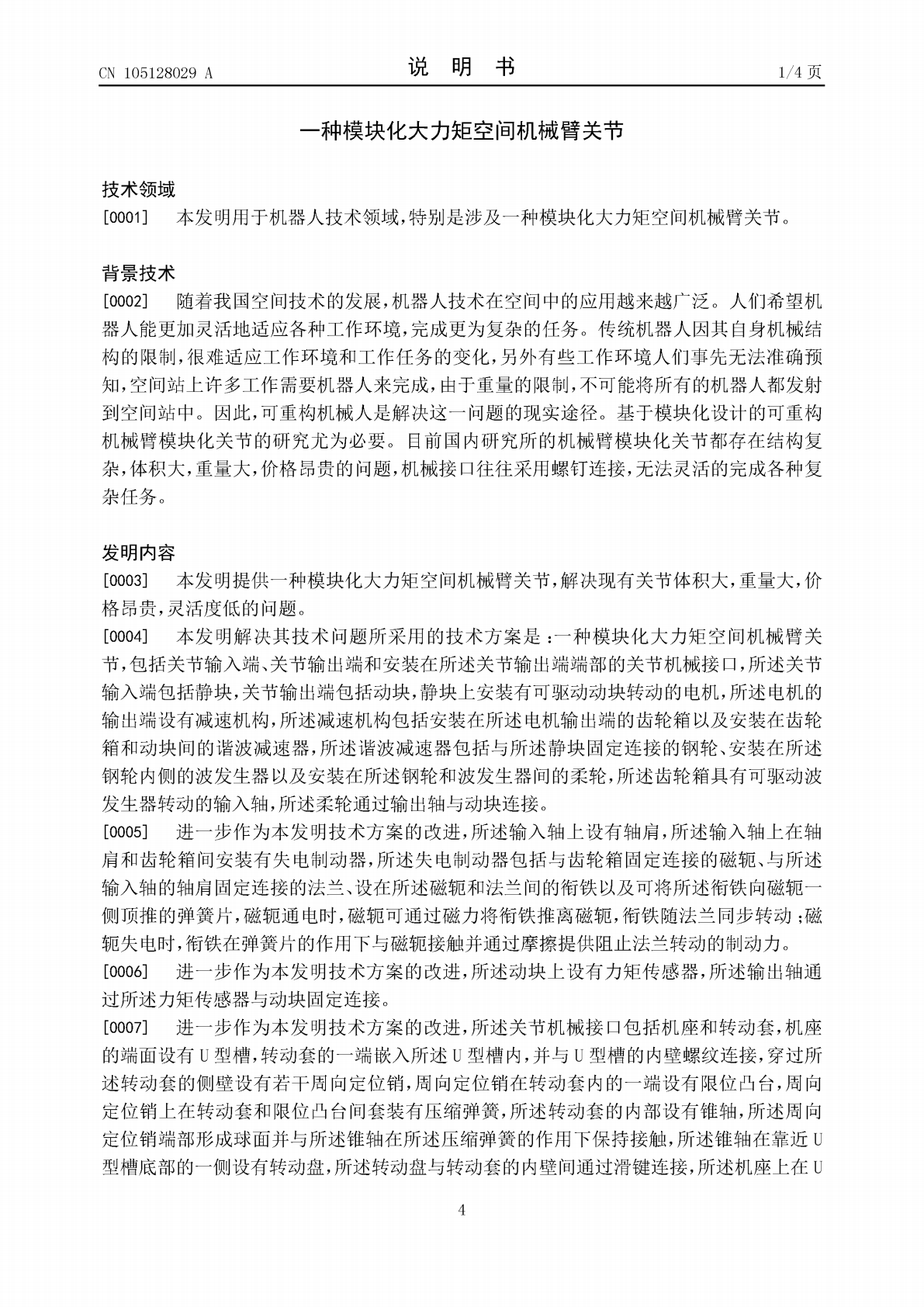
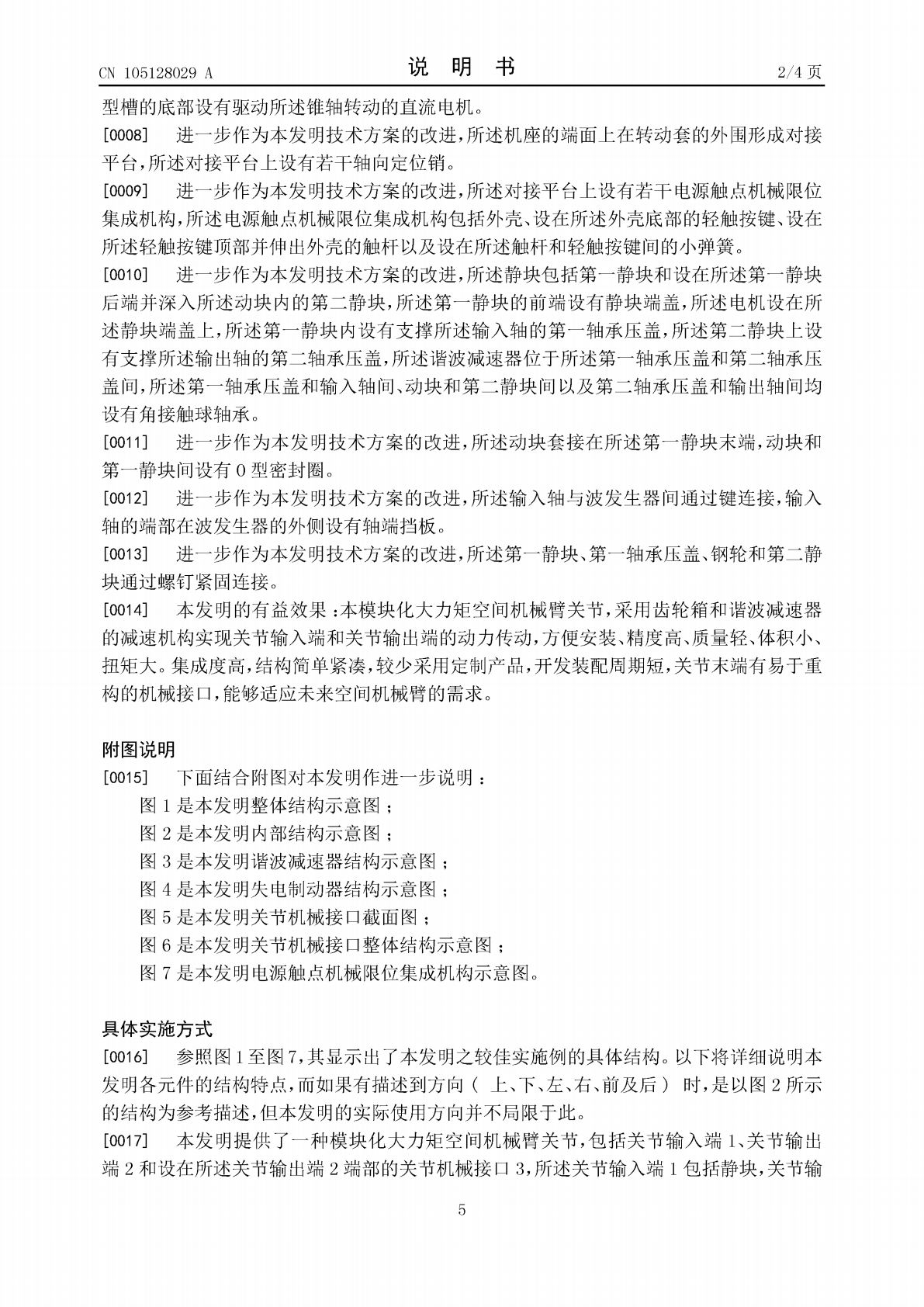
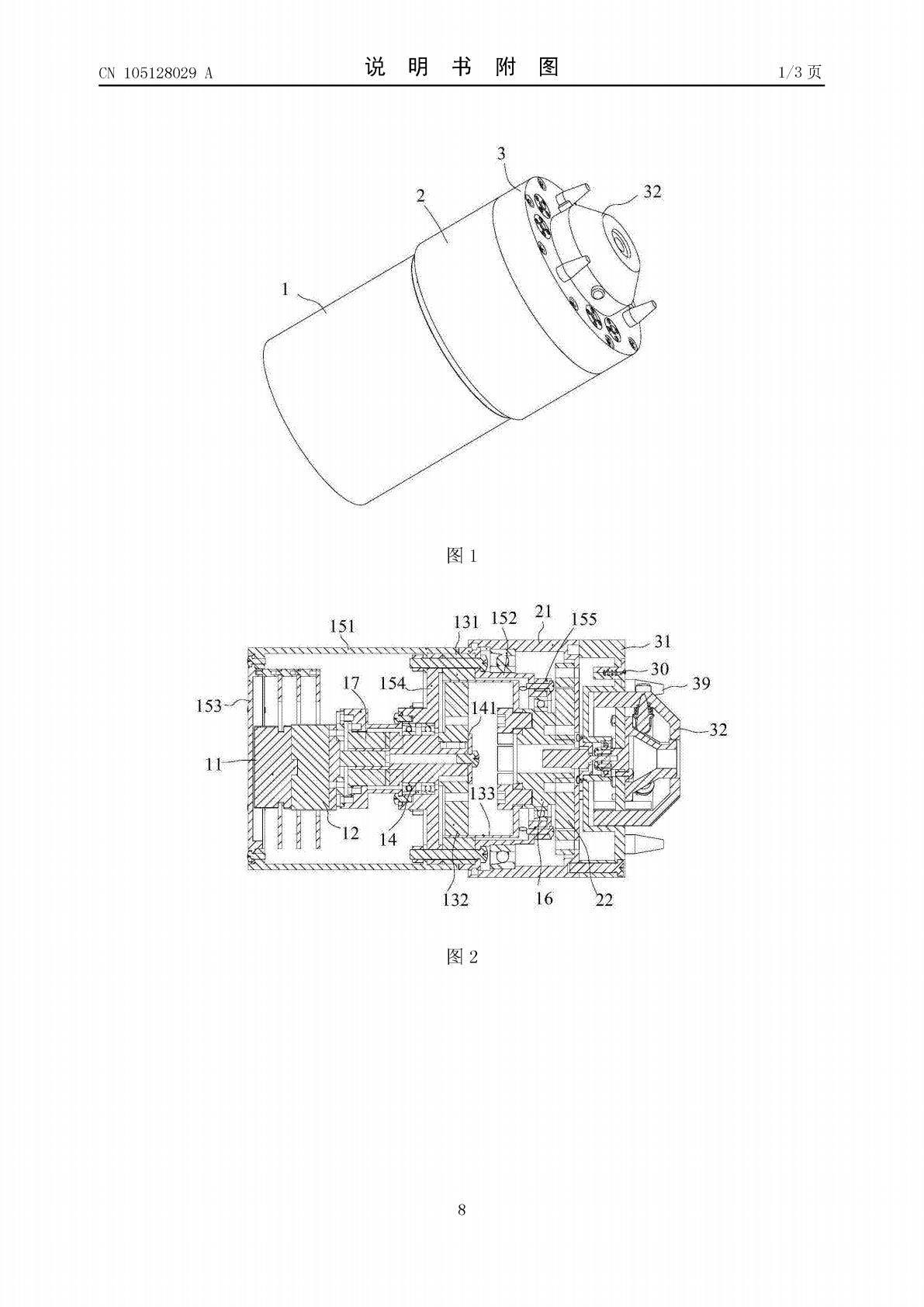
本发明公开了一种模块化大力矩空间机械臂关节,包括关节输入端、关节输出端和关节机械接口,关节输入端包括静块,关节输出端包括动块,静块上设有电机,电机的输出端设有减速机构,减速机构包括齿轮箱和谐波减速器,谐波减速器包括与静块固定连接的钢轮、设在钢轮内侧的波发生器以及设在钢轮和波发生器间的柔轮,齿轮箱具有可驱动波发生器转动的输入轴,柔轮通过输出轴与动块固定连接。本发明采用齿轮箱和谐波减速器的减速机构实现关节输入端和关节输出端的动力传动,方便安装、精度高、质量轻、体积小、扭矩大。集成度高,结构简单紧凑,较少采用定

一种大力矩的空间机械臂模块化关节.pdf
本发明公开了一种大力矩的空间机械臂模块化关节,包括壳体,和设置在壳体内的电机、通过传动机构与电机连接的输出轴、制动器及控制机构,所述谐波减速机和制动器分别设置在动块和静块内,柔轮、输出轴、动块依次刚性连接作为输出部件,静块、定子套筒、刚轮固定座、刚轮依次刚性连接,所述定子套筒固定套接在电机的定子外,所述刚轮固定座套设在转轴外并与刚轮固定连接,本发明通过将壳体分割成静块、动块两个部件,采用电机带动转轴转动进而通过谐波减速机带动动块转动,从而输出转矩的方式,不需将输出轴伸出壳体外,可减小关节的横向尺寸,精简了

一种模块化机械臂关节力矩传感器标定平台.pdf
一种模块化机械臂关节力矩传感器标定平台,它涉及一种稳定精确的扭矩输入平台,以解决现有标定传感器的平台输入输出不稳定的问题,它包括框架、力矩传递机构和底座;力矩传递机构包括固定横梁、活动横梁、托盘、绳轮组件和关节力矩传感器;关节力矩传感器包括法兰盘和应变片,法兰盘盘面上沿周向均布设置有多个应变梁;固定横梁安装在框架上,关节力矩传感器插装在布置于底座上的轴上,关节力矩传感器通过连接法兰安装于活动横梁的中部,活动横梁的一端通过绳轮组件与托盘连接,活动横梁的另一端通过绳轮组件与固定横梁连接。本发明涉及一种传感器标

一种机械臂模块化关节.pdf
本发明公开了一种用于机器人领域的机械臂模块化关节,该关节包括电机座、输入装置、输出装置、电机轴和中心孔走线线套;所述输入装置置于所述电机座内,包括:电机端盖,编码器磁环端盖、第一电机轴承、电机转子、电机、电机径向固定环、电机轴承轴向定位环、第二电机轴承、编码器处理电路板和编码器磁环;所述输出装置包括:第一输出轴承、输出调整环、输出内套筒、波发生器、输出密封轴承固定环、柔轮、第二输出轴承、输出法兰、输出外套筒、刚轮和输出外套筒锁紧环;所述输入装置和所述输出装置通过电机轴连接;所述波发生器、所述刚轮和所述柔轮

具有力矩保持特性的探月机械臂模块化关节.pdf
具有力矩保持特性的探月机械臂模块化关节,它涉及一种探月机械臂模块化关节。本发明解决了月球探测车的机械臂模块化关节存在的,发射成本高和月球探测车机械臂的使用寿命短的问题。本发明的驱动装置通过电机转子轴与谐波减速器输入端法兰盘连接,刚轮与角接触轴承内座固接,角接触轴承内座与输入装置外壳固接,柔轮与谐波减速器输出端法兰盘和输出法兰盘固接,角接触轴承内座与角接触轴承外座之间有背靠背角接触轴承,密封装置法兰盘与角接触轴承外座之间设有接触式填料密封结构和机械限位结构,电气装置固定在角接触轴承内座与输出法兰