
基于外部坐标测量的六自由度并联机构标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于外部坐标测量的六自由度并联机构标定方法.docx
基于外部坐标测量的六自由度并联机构标定方法标题:基于外部坐标测量的六自由度并联机构标定方法摘要:随着机器人技术的不断发展,六自由度并联机构在工业自动化和物流领域的应用越来越广泛。然而,精确标定并联机构的位置和姿态仍然是一个具有挑战性的问题。本文提出了一种基于外部坐标测量的六自由度并联机构标定方法,该方法能够提高并联机构的定位精度和姿态准确性。引言:六自由度并联机构在工业自动化、航空航天和医疗器械等领域起着重要作用。而并联机构的工作精度受到机构的刚度、驱动器和传感器的精确性等因素的影响。因此,在使用并联机构

基于正交位移测量系统的六自由度并联机构参数标定研究.docx
基于正交位移测量系统的六自由度并联机构参数标定研究基于正交位移测量系统的六自由度并联机构参数标定研究摘要:随着自动化技术的快速发展,六自由度并联机构在工业自动化、航空航天等领域中的应用越来越广泛。该研究旨在通过正交位移测量系统对六自由度并联机构的参数进行标定,提高机构运动控制的精度和稳定性。首先,介绍了六自由度并联机构的工作原理和结构特点。然后,详细阐述了正交位移测量系统的原理和核心技术。接着,提出了基于正交位移测量系统的六自由度并联机构参数标定方法。最后,通过实验验证了该方法的有效性和可行性。实验结果表
基于外部测量和修正的三坐标定位器定位精度提升方法.pdf
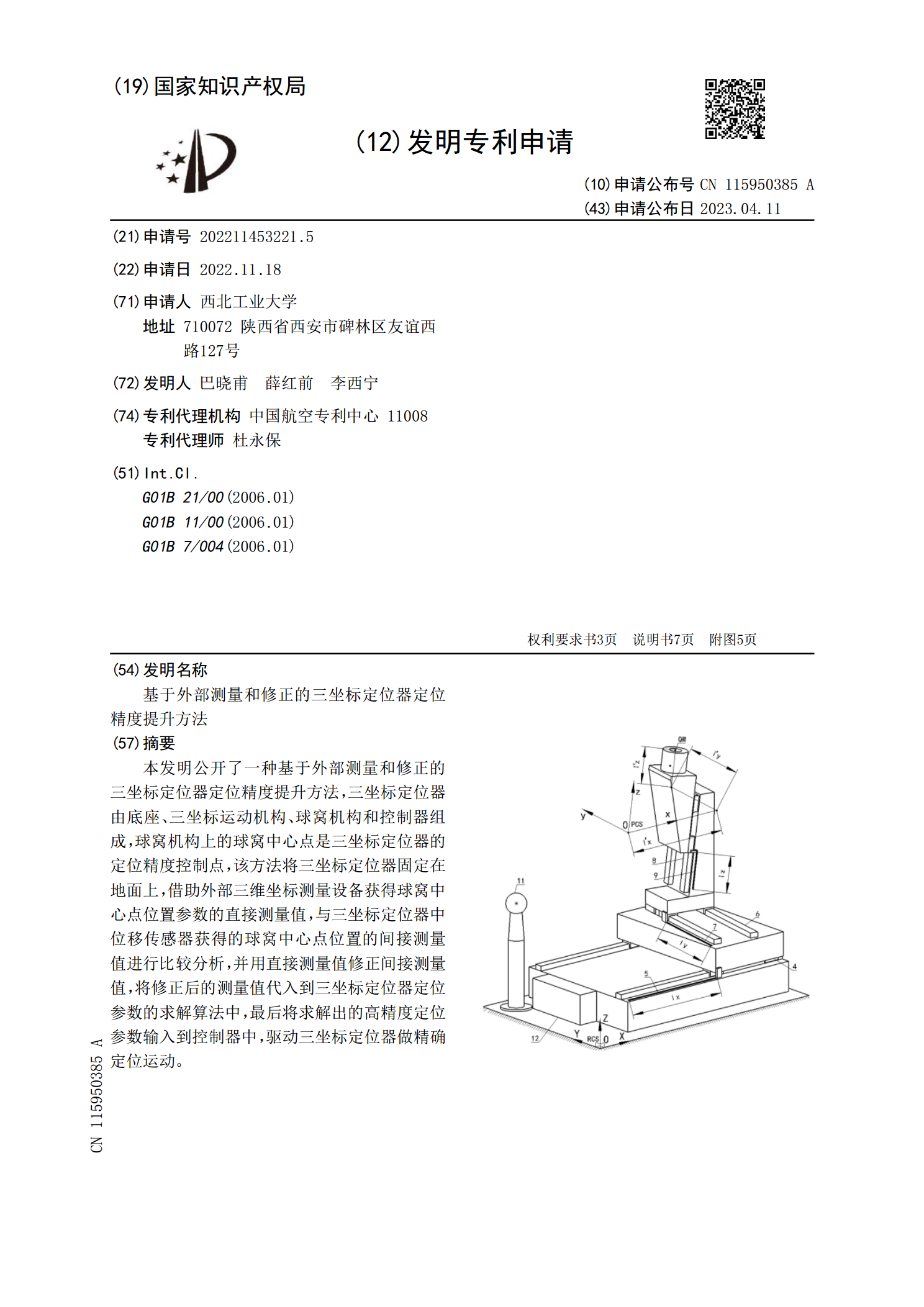
本发明公开了一种基于外部测量和修正的三坐标定位器定位精度提升方法,三坐标定位器由底座、三坐标运动机构、球窝机构和控制器组成,球窝机构上的球窝中心点是三坐标定位器的定位精度控制点,该方法将三坐标定位器固定在地面上,借助外部三维坐标测量设备获得球窝中心点位置参数的直接测量值,与三坐标定位器中位移传感器获得的球窝中心点位置的间接测量值进行比较分析,并用直接测量值修正间接测量值,将修正后的测量值代入到三坐标定位器定位参数的求解算法中,最后将求解出的高精度定位参数输入到控制器中,驱动三坐标定位器做精确定位运动。

新型二自由度并联机构的运动学标定方法.docx
新型二自由度并联机构的运动学标定方法摘要:本文针对新型二自由度并联机构的运动学标定问题,提出了一种基于多视角坐标转换的方法。该方法利用相机采集到的多个角度下机构末端的运动轨迹,通过三维重构和坐标转换,得到机构各部件的位置和姿态信息,进而求得机构的运动学参数。仿真和实验结果表明,该方法能够准确地完成运动学标定,为机构的运动控制和精度分析提供了有力支持。关键词:二自由度并联机构;运动学标定;多视角坐标转换;三维重构;运动参数;精度分析一、引言二自由度并联机构是一种重要的机械结构,在机器人、航空航天等领域有着广

基于拆分测量的6-UPS并联机构精度的标定.docx
基于拆分测量的6-UPS并联机构精度的标定摘要:本论文针对基于拆分测量的6-UPS并联机构的精度标定进行研究。首先,介绍了6-UPS并联机构的基本结构和工作原理。然后,详细分析了机构中各部件的误差来源,包括传感器误差、连接件误差和位置误差等。接着,提出了一种基于拆分测量的精度标定方法,该方法通过测量各个部件的误差项,建立了误差传递模型,并利用标定装置进行标定。最后,通过实验验证了该标定方法的可行性,并分析了标定结果的精度。实验结果表明,在采用该标定方法进行标定后,6-UPS并联机构的精度得到了有效提高,具