
基于八叉树的轻量级场景结构构建.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于八叉树的轻量级场景结构构建.docx
基于八叉树的轻量级场景结构构建八叉树是一种用于空间划分和查找的数据结构。它可以将一个三维空间递归地划分为八个子空间,并分配一个唯一的地址用于节点的索引。八叉树的使用范围广泛,从三维图形渲染到计算机视觉和机器人导航等领域。在游戏开发中,八叉树也被广泛用来构建场景并进行碰撞检测和物理模拟。本文将探讨基于八叉树的轻量级场景结构构建。传统的八叉树在构建场景时会面临空间和时间的挑战。在处理具有大量物体的场景时,八叉树的构建和遍历时间会急剧增加,导致性能下降。此外,传统的八叉树在处理稀疏场景时也会浪费大量的存储空间。

基于混合空间剖分八叉树场景管理技术的研究.docx
基于混合空间剖分八叉树场景管理技术的研究混合空间剖分八叉树场景管理技术是一种介于空间分割和物体分割之间的新型场景管理技术,能够极大地提升场景渲染效率和交互性能。本文将从以下几个方面展开研究。一、技术概述混合空间剖分八叉树场景管理技术是一种基于八叉树数据结构的场景管理技术,将场景空间分割为一系列八叉树节点,以实现不同精度的场景物体管理和渲染。与传统的空间剖分和物体剖分技术相比,混合空间剖分八叉树场景管理技术既能够避免处理冗余物体,又能够灵活地控制场景分割粒度,从而提升场景渲染效率和交互性能。二、技术原理混合
一种基于GPU的八叉树并行构建方法.pdf
本发明公开了一种基于GPU的八叉树并行构建方法,在需要进行渲染的模型空间的三个坐标轴上分别选取若干个采样分割点,计算每个采样分割点的SAH花费,然后选取每个坐标轴上SAH花费最小的分割点,将选取的这三个分割点作为分割平面,对模型空间中的场景数据逐级进行划分,直至划分到每个节点所含面片数不多于10个。本发明由于在三个维度上同步进行基于SAH的选择划分,使得这个改良后的八叉树结构质量更高,大大减少了无效的遍历和相交操作,尤其适合大光线包的遍历。
基于LOD模型和四叉树层次结构的三维场景渲染算法.pdf
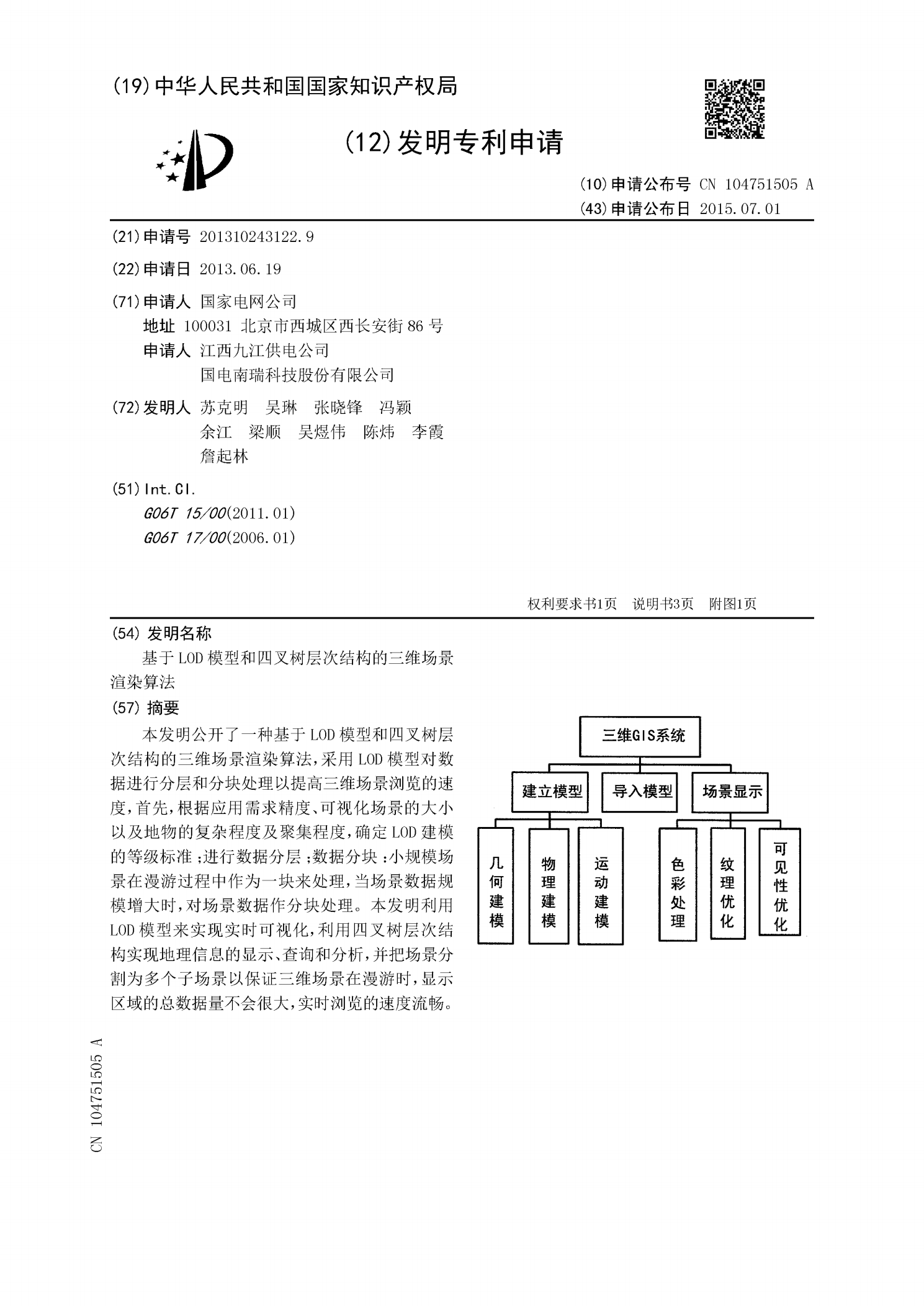
本发明公开了一种基于LOD模型和四叉树层次结构的三维场景渲染算法,采用LOD模型对数据进行分层和分块处理以提高三维场景浏览的速度,首先,根据应用需求精度、可视化场景的大小以及地物的复杂程度及聚集程度,确定LOD建模的等级标准;进行数据分层;数据分块:小规模场景在漫游过程中作为一块来处理,当场景数据规模增大时,对场景数据作分块处理。本发明利用LOD模型来实现实时可视化,利用四叉树层次结构实现地理信息的显示、查询和分析,并把场景分割为多个子场景以保证三维场景在漫游时,显示区域的总数据量不会很大,实时浏览的速度
基于八叉树的复杂矿体块段模型构建方法及系统.pdf
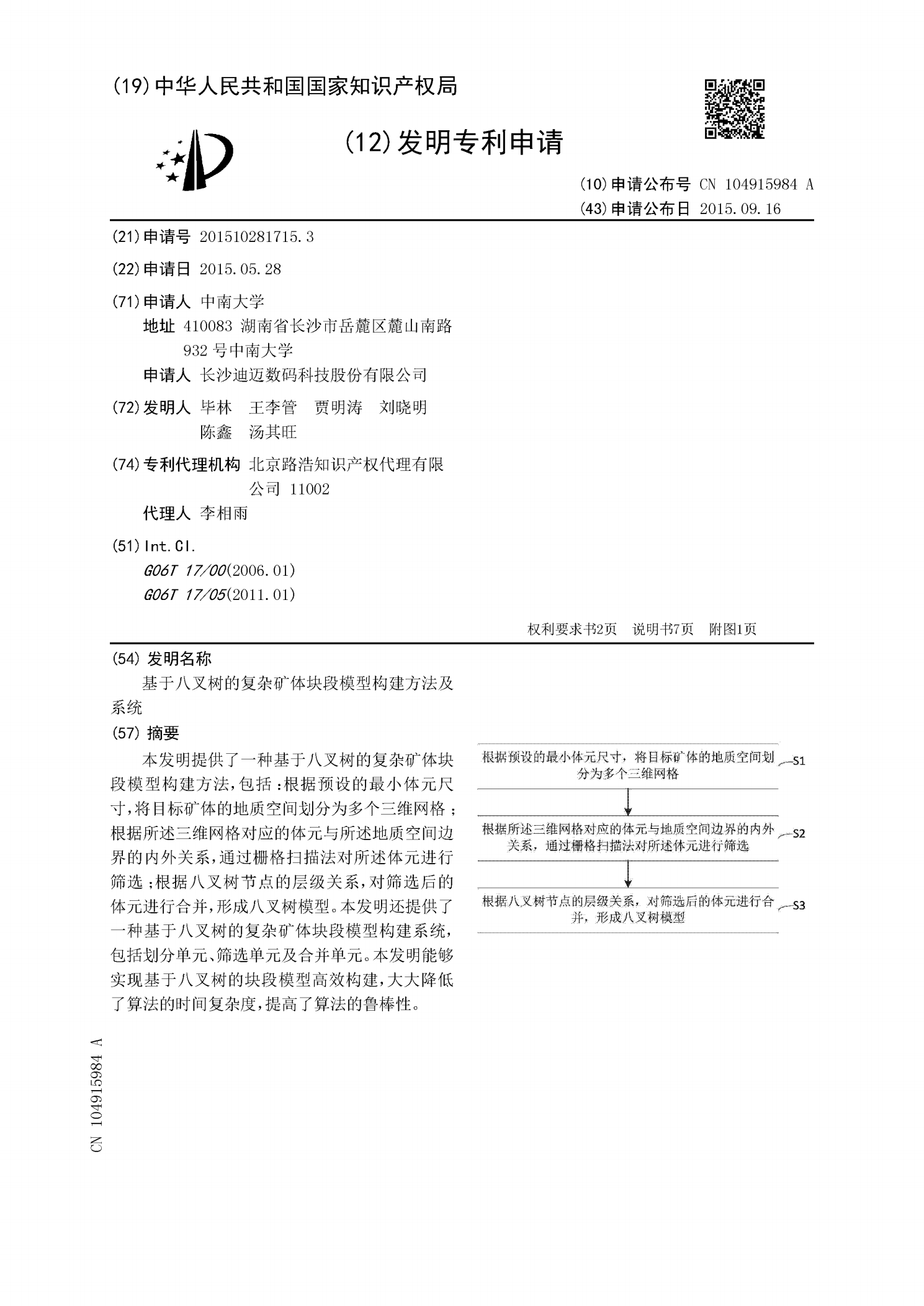
本发明提供了一种基于八叉树的复杂矿体块段模型构建方法,包括:根据预设的最小体元尺寸,将目标矿体的地质空间划分为多个三维网格;根据所述三维网格对应的体元与所述地质空间边界的内外关系,通过栅格扫描法对所述体元进行筛选;根据八叉树节点的层级关系,对筛选后的体元进行合并,形成八叉树模型。本发明还提供了一种基于八叉树的复杂矿体块段模型构建系统,包括划分单元、筛选单元及合并单元。本发明能够实现基于八叉树的块段模型高效构建,大大降低了算法的时间复杂度,提高了算法的鲁棒性。