
一种基于视觉的轮式移动机器人快速目标跟踪方法.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于视觉的轮式移动机器人快速目标跟踪方法.pdf
本发明公开了一种基于视觉的轮式移动机器人快速目标跟踪方法。轮式移动机器人通过单目式摄像头实时采集机器人前方的视觉信息,根据目标物体的形状与颜色特性筛选出目标物体;准确识别出目标后,通过对摄像头的标定与测量获得摄像头的内外参数,再结合目标物体质心的图像坐标,还原出目标的空间坐标信息;根据目标的空间坐标设计跟踪算法,使得机器人能有效、快速地跟踪目标。本简单易行,对硬件环境要求不高,跟踪精度较高,不会出现因自身运动而造成的目标丢失问题。

基于视觉的移动机器人目标跟踪方法.docx
基于视觉的移动机器人目标跟踪方法随着科技的不断进步和发展,机器人技术成为当今最受关注的领域之一。在移动机器人领域,目标跟踪是最基本的任务之一。目标跟踪是指移动机器人通过感知和识别目标来实现自主的智能控制,从而实现目标追踪和定位,进而完成任务。视觉技术是目前移动机器人相对成熟且广泛采用的技术之一,该技术通过对环境中的目标进行视觉识别和跟踪,并调整机器人的运动轨迹,从而实现目标跟踪。基于视觉的移动机器人目标跟踪主要包括以下步骤:1.图像采集:移动机器人通过搭载摄像头等传感器来采集环境中的图像。机器人的视觉系统

基于视觉的移动机器人目标跟踪方法.pptx
基于视觉的移动机器人目标跟踪方法目录添加章节标题视觉目标跟踪技术概述目标跟踪的定义和重要性目标跟踪的常见方法基于视觉的目标跟踪技术简介基于视觉的移动机器人目标跟踪方法移动机器人概述基于视觉的移动机器人目标跟踪原理基于视觉的移动机器人目标跟踪算法算法性能评估基于视觉的移动机器人目标跟踪技术应用移动机器人应用领域目标跟踪技术在移动机器人中的应用移动机器人目标跟踪技术的发展趋势基于视觉的移动机器人目标跟踪技术面临的挑战与解决方案面临的挑战解决方案未来研究方向基于视觉的移动机器人目标跟踪技术的实际案例分析案例一:

基于快速终端滑模的轮式移动机器人轨迹跟踪方法.pdf
本发明公开基于快速终端滑模的轮式移动机器人轨迹跟踪方法。该方法包括四个步骤:(1)建立轮式移动机器人的运动学模型和期望轨迹模型,并根据运动学模型和期望轨迹模型建立误差模型;(2)引入合适的滑模面s
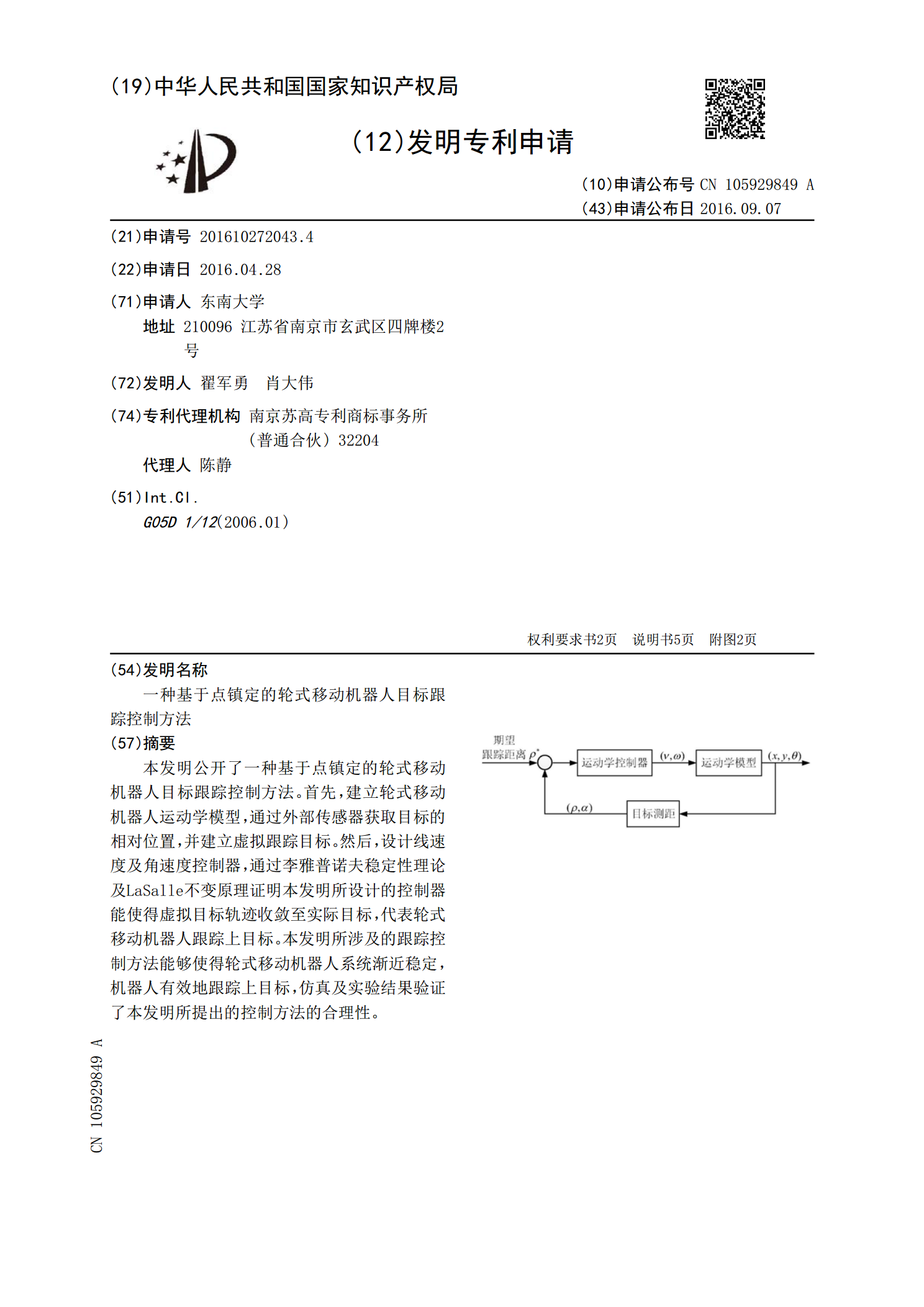
一种基于点镇定的轮式移动机器人目标跟踪控制方法.pdf
本发明公开了一种基于点镇定的轮式移动机器人目标跟踪控制方法。首先,建立轮式移动机器人运动学模型,通过外部传感器获取目标的相对位置,并建立虚拟跟踪目标。然后,设计线速度及角速度控制器,通过李雅普诺夫稳定性理论及LaSalle不变原理证明本发明所设计的控制器能使得虚拟目标轨迹收敛至实际目标,代表轮式移动机器人跟踪上目标。本发明所涉及的跟踪控制方法能够使得轮式移动机器人系统渐近稳定,机器人有效地跟踪上目标,仿真及实验结果验证了本发明所提出的控制方法的合理性。