
一种齿轮的故障诊断方法.pdf

涵蓄****09


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种齿轮故障诊断平台及齿轮故障诊断方法.pdf
本发明公开了一种齿轮故障诊断平台及齿轮故障诊断方法,在该平台上通过模拟齿轮故障采集振动信号,采用改进的局部保持投影算法与贝叶斯分类器结合,通过贝叶斯分类器正确分类率来判断模式识别的效果,通过振动加速度传感器测量齿轮故障的振动信号,先采用主成分分析,然后采用核变换、构造最邻近图、求映射空间等;根据多故障分类下贝叶斯分类器分类识别。与主成分分析、拉普拉斯算法、局部保持投影相比,改进的局部保持投影故障识别率大大提高。改进的局部保持投影算法与贝叶斯分类器结合的故障模式识别方法提高了故障识别率和精确度,提高了齿轮的
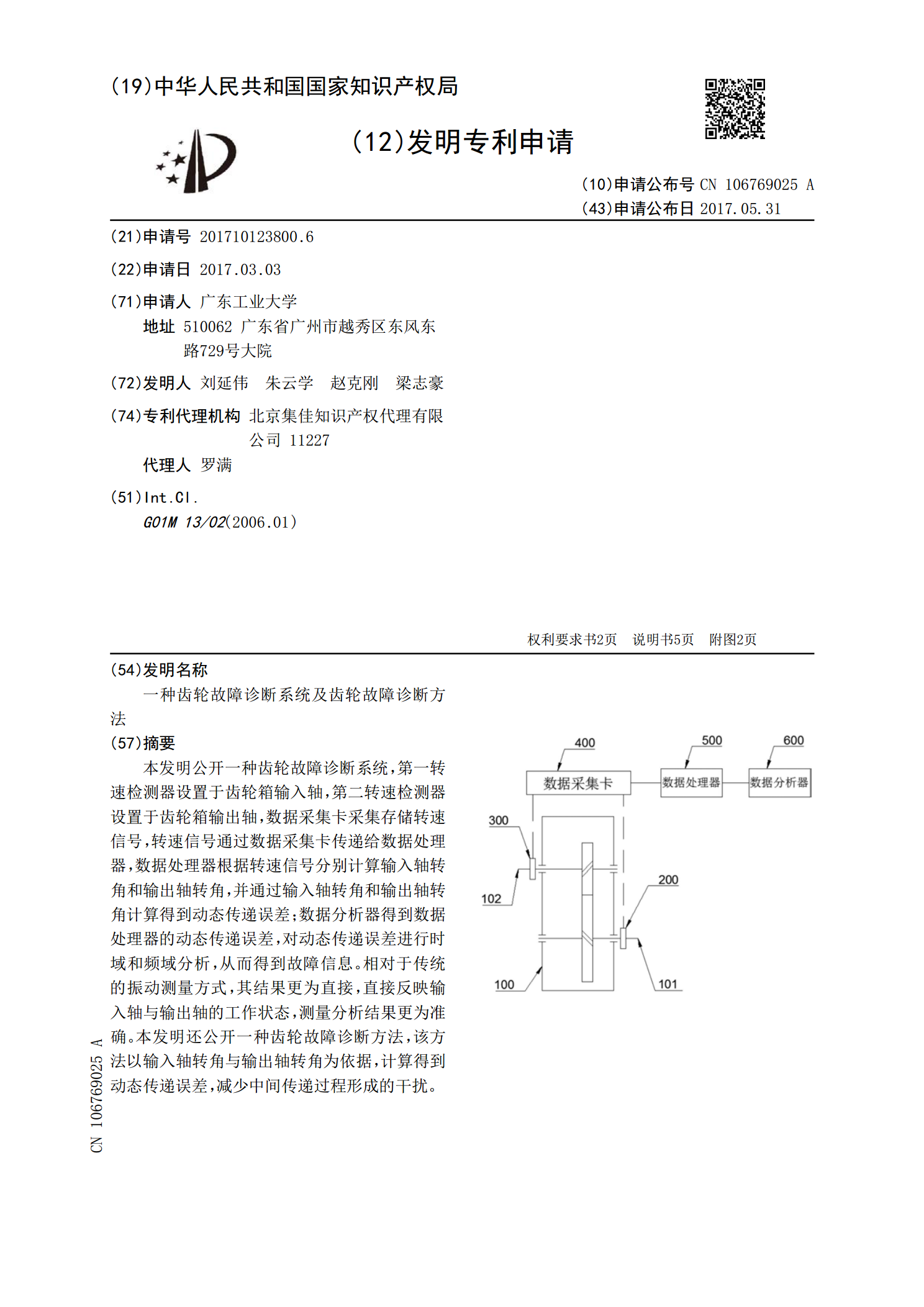
一种齿轮故障诊断系统及齿轮故障诊断方法.pdf
本发明公开一种齿轮故障诊断系统,第一转速检测器设置于齿轮箱输入轴,第二转速检测器设置于齿轮箱输出轴,数据采集卡采集存储转速信号,转速信号通过数据采集卡传递给数据处理器,数据处理器根据转速信号分别计算输入轴转角和输出轴转角,并通过输入轴转角和输出轴转角计算得到动态传递误差;数据分析器得到数据处理器的动态传递误差,对动态传递误差进行时域和频域分析,从而得到故障信息。相对于传统的振动测量方式,其结果更为直接,直接反映输入轴与输出轴的工作状态,测量分析结果更为准确。本发明还公开一种齿轮故障诊断方法,该方法以输入轴

一种齿轮的故障诊断方法.pdf
本发明公开了一种齿轮的故障诊断方法,首先构建齿轮故障分类器,然后获取未知齿轮的振动信号,并对该未知齿轮的振动信号进行分解,得到未知齿轮的固有旋转分量,进一步计算得到未知齿轮的样本熵特征向量;最后利用齿轮故障分类器对该未知齿轮的样本熵特征向量数据进行比对分类,得到该未知齿轮故障类型的诊断结果。本发明方法的优点是:计算复杂度比较低,信号分解效率高;信号分解的边缘效应只出现在第一个上过零点时刻之前,不会随信号分解不断传输,获取的不同类型故障特征区别明显,诊断精确度高。
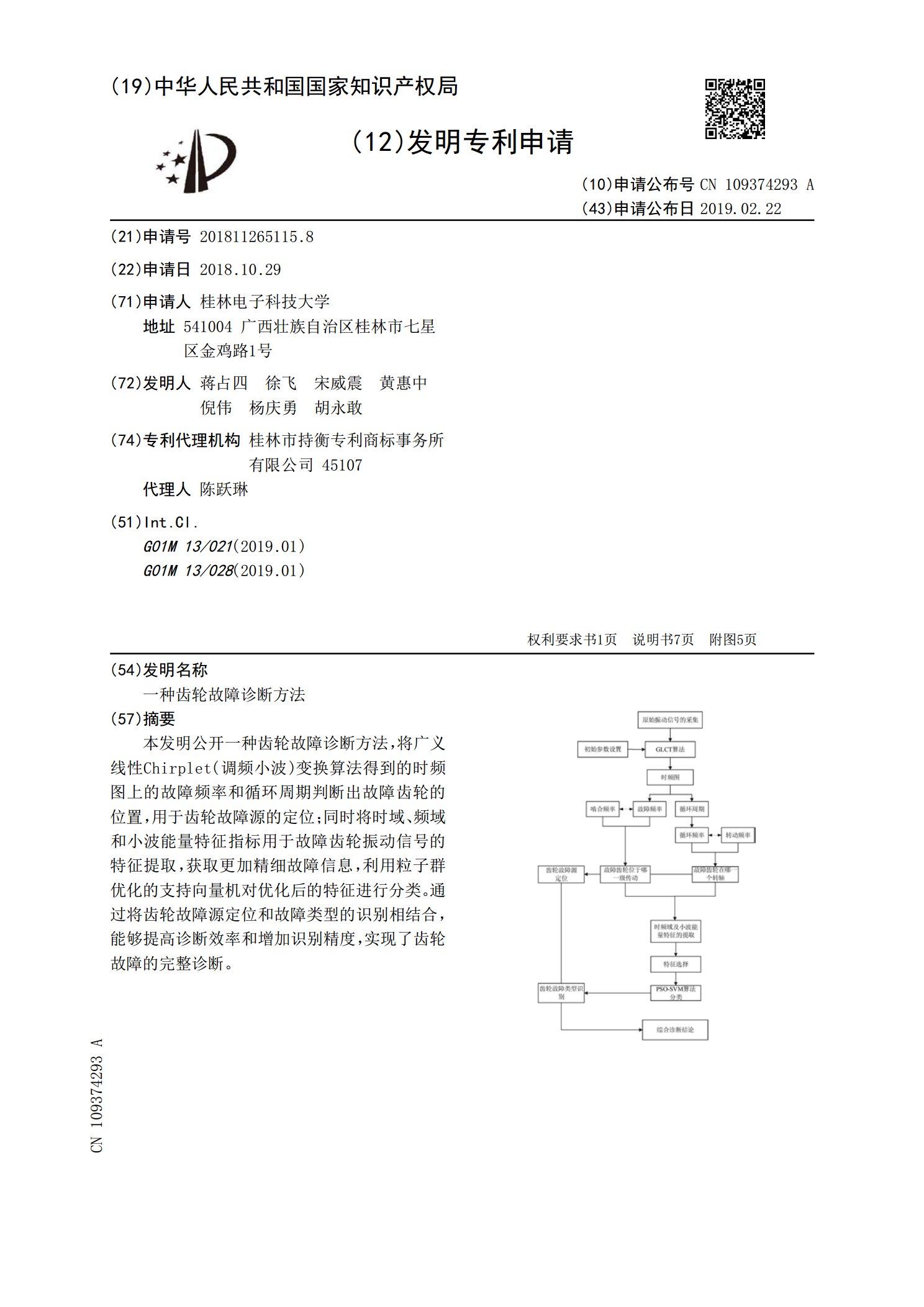
一种齿轮故障诊断方法.pdf
本发明公开一种齿轮故障诊断方法,将广义线性Chirplet(调频小波)变换算法得到的时频图上的故障频率和循环周期判断出故障齿轮的位置,用于齿轮故障源的定位;同时将时域、频域和小波能量特征指标用于故障齿轮振动信号的特征提取,获取更加精细故障信息,利用粒子群优化的支持向量机对优化后的特征进行分类。通过将齿轮故障源定位和故障类型的识别相结合,能够提高诊断效率和增加识别精度,实现了齿轮故障的完整诊断。

一种行星齿轮故障诊断方法.pdf
本发明公开了一种基于自适应噪声的完备总体经验模态分解和模糊熵的行星齿轮故障诊断方法。首先采用自适应噪声的完备总体经验模态分解方法对原始信号进行分解获得高质量完备的本征模态函数,针对各本征模态函数,提出一种能够更准确描述信号平稳性与复杂性的故障特征量化参数—模糊熵。以各本征模态函数的模糊熵作为故障特征,并将其作为MLP神经网络的输入,以均方差作为MLP神经网络的训练标准,利用训练样本对MLP神经网络进行训练,利用训练完毕的MLP神经网络可实现行星齿轮故障种类的识别与分类。该方法自适应能力强、准确性高,可识别