
基于预设性能函数的机械臂仿人运动控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于预设性能函数的机械臂仿人运动控制研究.docx
基于预设性能函数的机械臂仿人运动控制研究基于预设性能函数的机械臂仿人运动控制研究摘要:随着机械臂技术的不断发展,机械臂的应用范围越来越广泛。在某些特定的应用领域,需要机械臂能够像人类一样执行任务。本文提出了一种基于预设性能函数的机械臂仿人运动控制方法。通过对人类运动的分析,提取出一些关键的运动特征,并将其作为性能函数的输入。通过优化性能函数,使得机械臂的运动更加接近人类运动。关键词:机械臂;仿人运动;预设性能函数1.引言机械臂是一种能够完成任务的机电一体化装置,具有高精度、高灵活性和高自由度等特点。在许多

基于预设性能函数的机械臂仿人运动控制研究的开题报告.docx
基于预设性能函数的机械臂仿人运动控制研究的开题报告1.研究背景随着机器人技术的不断发展,机械臂已经成为了机器人应用中的重要组成部分。机械臂可以被广泛地应用于各种不同的领域,例如:工业生产、医疗保健、家庭服务、教育培训、科学研究等等。而机械臂的仿人化运动控制技术是机械臂应用中的重要研究内容。传统的机械臂控制方法主要是基于运动学和动力学建模,然而这种方法难以实现仿人化的运动控制。为了解决这个问题,一种基于预设性能函数的机械臂仿人运动控制方法被提出。这种方法可以利用预设性能函数来代替传统的运动学和动力学建模,从

基于预设性能函数的机械臂快速无超调拟人运动控制算法.pptx
添加副标题目录PART01算法的提出背景算法的基本原理算法的主要特点PART02性能函数的选取性能函数的优化性能函数的实现PART03机械臂的运动学模型机械臂的控制策略机械臂的仿真实验PART04实验环境的搭建实验结果的分析算法的优缺点分析PART05在工业自动化领域的应用在医疗康复领域的应用在未来发展方向的展望PART06总结算法的主要成果对未来研究的建议感谢您的观看
基于分段阈值事件触发的机械臂预设性能控制方法.pdf
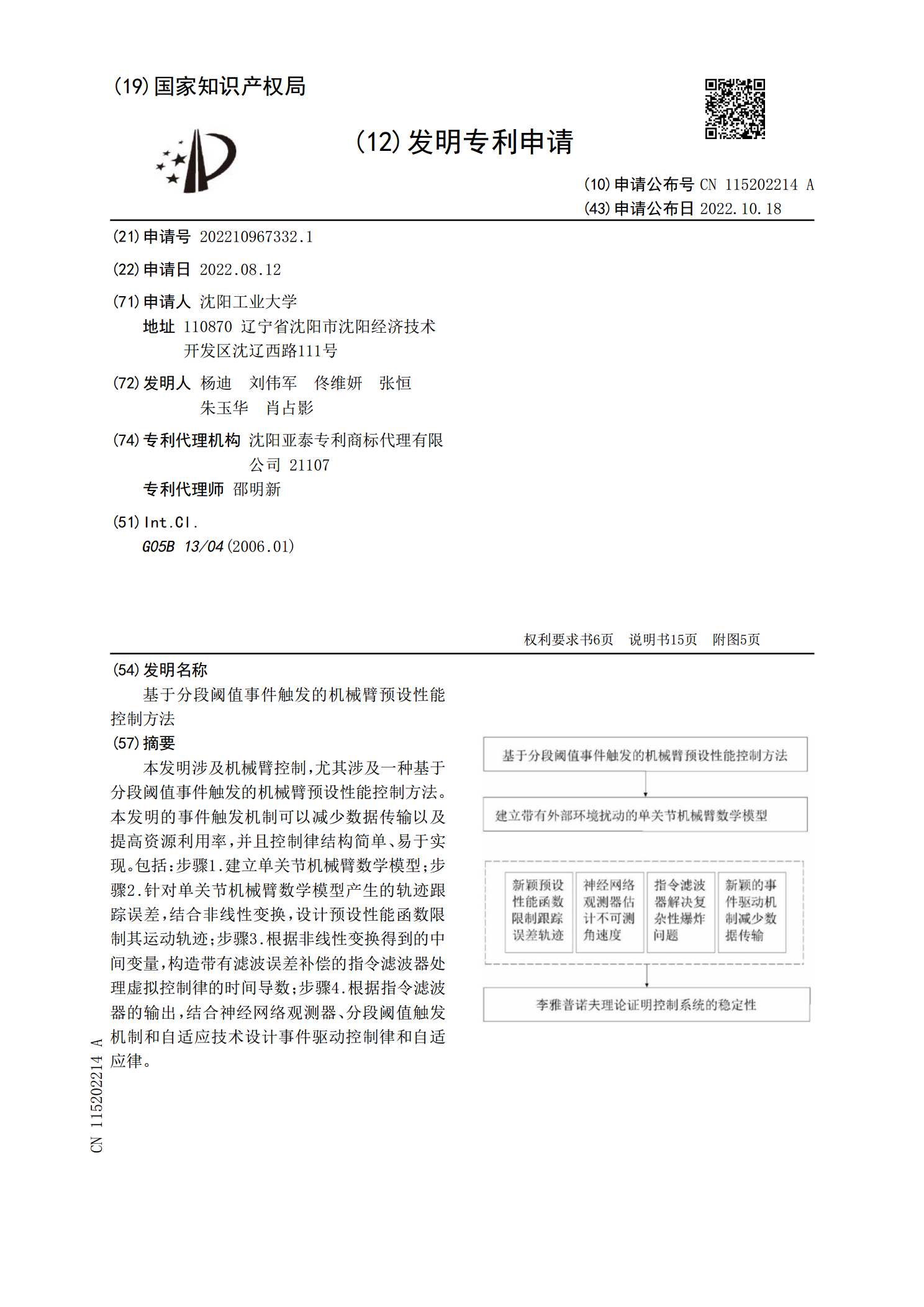
本发明涉及机械臂控制,尤其涉及一种基于分段阈值事件触发的机械臂预设性能控制方法。本发明的事件触发机制可以减少数据传输以及提高资源利用率,并且控制律结构简单、易于实现。包括:步骤1.建立单关节机械臂数学模型;步骤2.针对单关节机械臂数学模型产生的轨迹跟踪误差,结合非线性变换,设计预设性能函数限制其运动轨迹;步骤3.根据非线性变换得到的中间变量,构造带有滤波误差补偿的指令滤波器处理虚拟控制律的时间导数;步骤4.根据指令滤波器的输出,结合神经网络观测器、分段阈值触发机制和自适应技术设计事件驱动控制律和自适应律。

人形机械臂的仿人运动规划的研究.docx
人形机械臂的仿人运动规划的研究人形机械臂的仿人运动规划的研究摘要:人形机械臂的仿人运动规划是机器人领域中的一项重要研究内容。通过研究人类的运动规律和动作,将其应用到机械臂中,可以实现机械臂的更加灵活、自主和高效的运动。本文从人形机械臂的定义、仿人运动规划的意义以及当前研究的现状出发,对人形机械臂的仿人运动规划进行了深入的研究,并提出了解决方案和设计原则。通过本文的研究,可以为人形机械臂的仿人运动规划提供一些参考和借鉴。关键词:人形机械臂、仿人运动规划、动作、机器人、灵活性1.引言人形机械臂作为机器人的一种