
基于车车协同的汽车换道避撞控制策略研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车车协同的汽车换道避撞控制策略研究.docx
基于车车协同的汽车换道避撞控制策略研究基于车车协同的汽车换道避撞控制策略研究摘要:汽车换道是一项重要的交通动作,尤其对于高速公路等道路,换道决策和控制至关重要。本文以车车协同为基础,研究了汽车换道避撞控制策略。首先介绍了车车协同的基本概念和技术特点,然后分析了汽车换道过程中的危险因素和风险评估方法。在此基础上,提出了基于车车协同的汽车换道避撞控制策略,包括感知、决策和执行三个层面。最后,通过仿真实验验证了该策略的可行性和有效性。关键词:车车协同;汽车换道;避撞控制策略;风险评估1.引言随着汽车智能化和自动

基于线性路径跟踪控制的换道避撞控制策略研究.docx
基于线性路径跟踪控制的换道避撞控制策略研究基于线性路径跟踪控制的换道避撞控制策略研究摘要:换道避撞是自动驾驶车辆面临的一个重要挑战。本研究提出了一种基于线性路径跟踪控制的换道避撞控制策略,通过分析并优化控制算法,实现了车辆在换道过程中避免碰撞的能力。实验结果表明,该控制策略在多种场景下均能有效地保证车辆的安全性和稳定性。关键词:换道避撞,自动驾驶,线性路径跟踪控制,安全性,稳定性1.引言随着自动驾驶技术的发展,换道避撞成为了自动驾驶车辆面临的一个重要问题。在高速公路等场景中,其他车辆的行为和动态变化给车辆

基于滑模控制的车车协同主动避撞算法.docx
基于滑模控制的车车协同主动避撞算法基于滑模控制的车车协同主动避撞算法摘要:随着交通工具的增多和道路交通的复杂性,车辆之间的碰撞事故成为道路安全的重要问题。为了解决这一问题,本文提出了一种基于滑模控制的车车协同主动避撞算法。该算法利用车辆之间的通信和传感器信息,实现实时的协同避撞决策和控制。通过理论证明和仿真实验,证明该算法具有较高的避撞准确度和稳定性。关键词:滑模控制;车车协同;主动避撞;算法1.引言随着汽车数量的快速增长,交通安全问题日益突出。根据统计数据,车辆碰撞事故是造成交通事故的主要原因之一。为了

一种基于车车通信的协同避撞装置及避撞方法.pdf
本发明提供一种基于车车通信的协同避撞装置,属于智能交通/汽车安全控制技术领域,包括车辆运行信息采集单元、车车通信单元、信息处理控制单元、数据存储单元、报警单元和执行单元。车辆运行信息采集单元包括轮速传感器和测距模块。本发明增加了车辆行驶的安全保证,但执行协同避撞的各个车辆必须同时加装协同避撞装置,单辆车只能执行普通避撞装置的功能;本发明带有车车通信单元,可以实时采集周围车辆车距,车速等信息,并与周围的车辆进行实时信息交互;当出现车距小于安全车距时,后车信息处理控制单元会通过计算期望减速度完成减速避撞;当仅
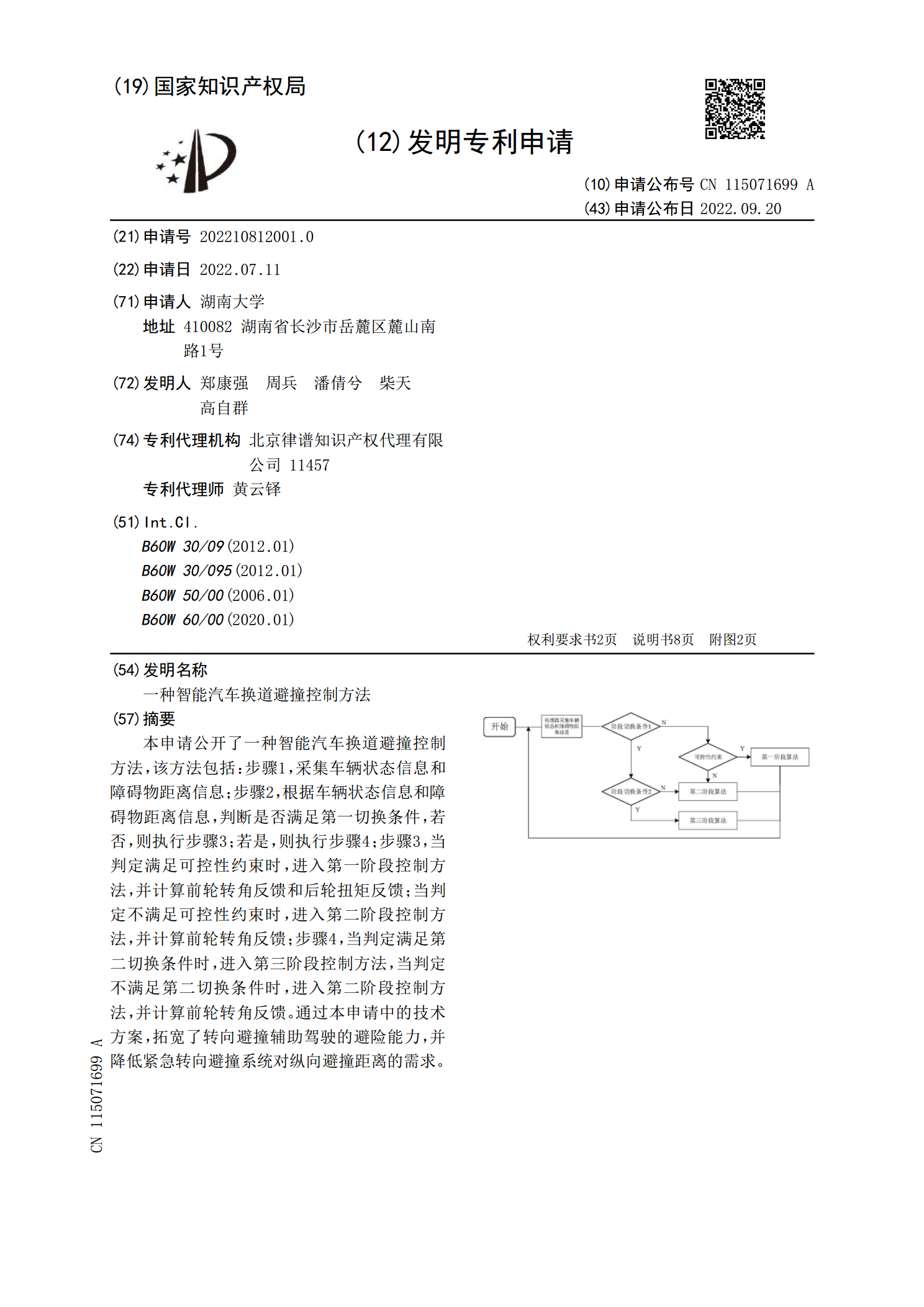
一种智能汽车换道避撞控制方法.pdf
本申请公开了一种智能汽车换道避撞控制方法,该方法包括:步骤1,采集车辆状态信息和障碍物距离信息;步骤2,根据车辆状态信息和障碍物距离信息,判断是否满足第一切换条件,若否,则执行步骤3;若是,则执行步骤4;步骤3,当判定满足可控性约束时,进入第一阶段控制方法,并计算前轮转角反馈和后轮扭矩反馈;当判定不满足可控性约束时,进入第二阶段控制方法,并计算前轮转角反馈;步骤4,当判定满足第二切换条件时,进入第三阶段控制方法,当判定不满足第二切换条件时,进入第二阶段控制方法,并计算前轮转角反馈。通过本申请中的技术方案,