
多轴机械臂3D打印的运动-挤料协同控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多轴机械臂3D打印的运动-挤料协同控制方法.docx
多轴机械臂3D打印的运动-挤料协同控制方法摘要:随着3D打印技术的不断发展,多轴机械臂在3D打印中的应用越来越广泛。然而,由于多轴机械臂的结构特点以及挤料过程中的复杂性,如何实现高效的运动-挤料协同控制成为了一个挑战。本文基于多轴机械臂3D打印的运动-挤料协同控制需求,提出了一种新的方法。通过对多轴机械臂的动力学建模和挤料过程的动态分析,设计了一种基于PID控制器和模糊控制器的协同控制策略。通过实验验证,表明该方法能够有效提高多轴机械臂3D打印的质量和效率。关键词:多轴机械臂,3D打印,运动-挤料协同控制

基于ROS的六轴机械臂3D打印运动规划方法.docx
基于ROS的六轴机械臂3D打印运动规划方法基于ROS的六轴机械臂3D打印运动规划方法摘要:随着3D打印技术的发展,越来越多的领域开始应用3D打印技术。而机械臂作为3D打印设备的重要组成部分,对运动规划具有重要的影响。本文基于ROS(机器人操作系统)平台,通过分析机械臂的运动学和动力学特性,提出了一种基于ROS的六轴机械臂3D打印的运动规划方法。该方法能够有效地规划机械臂的运动轨迹,使得3D打印过程中的运动更加平滑和精确。实验证明,该方法能够提高机械臂的运动效率和精度。关键词:ROS;六轴机械臂;3D打印;
空中3D打印挤料与托料装置.pdf
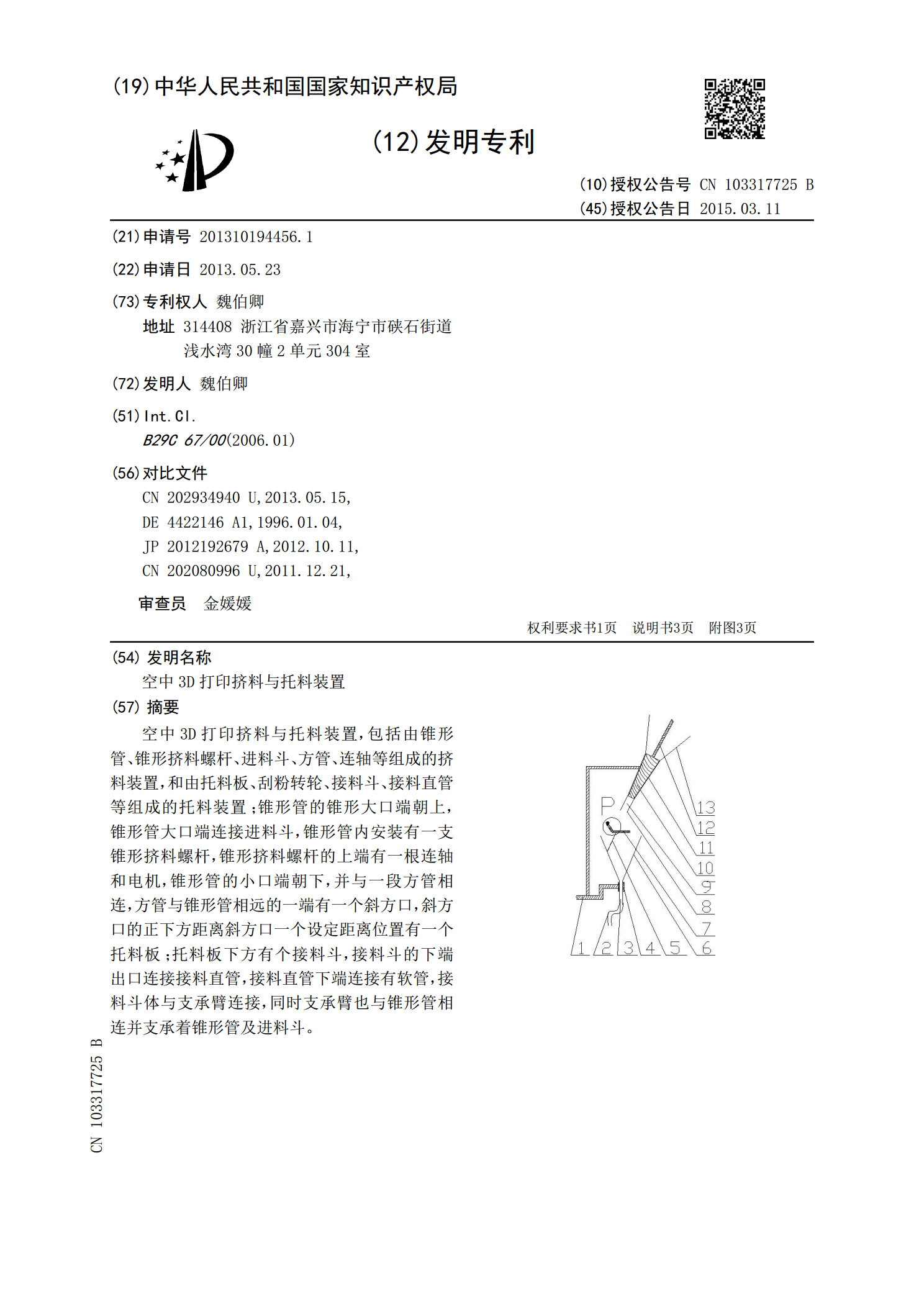
空中3D打印挤料与托料装置,包括由锥形管、锥形挤料螺杆、进料斗、方管、连轴等组成的挤料装置,和由托料板、刮粉转轮、接料斗、接料直管等组成的托料装置;锥形管的锥形大口端朝上,锥形管大口端连接进料斗,锥形管内安装有一支锥形挤料螺杆,锥形挤料螺杆的上端有一根连轴和电机,锥形管的小口端朝下,并与一段方管相连,方管与锥形管相远的一端有一个斜方口,斜方口的正下方距离斜方口一个设定距离位置有一个托料板;托料板下方有个接料斗,接料斗的下端出口连接接料直管,接料直管下端连接有软管,接料斗体与支承臂连接,同时支承臂也与锥形管
巧克力3D打印挤料装置.pdf
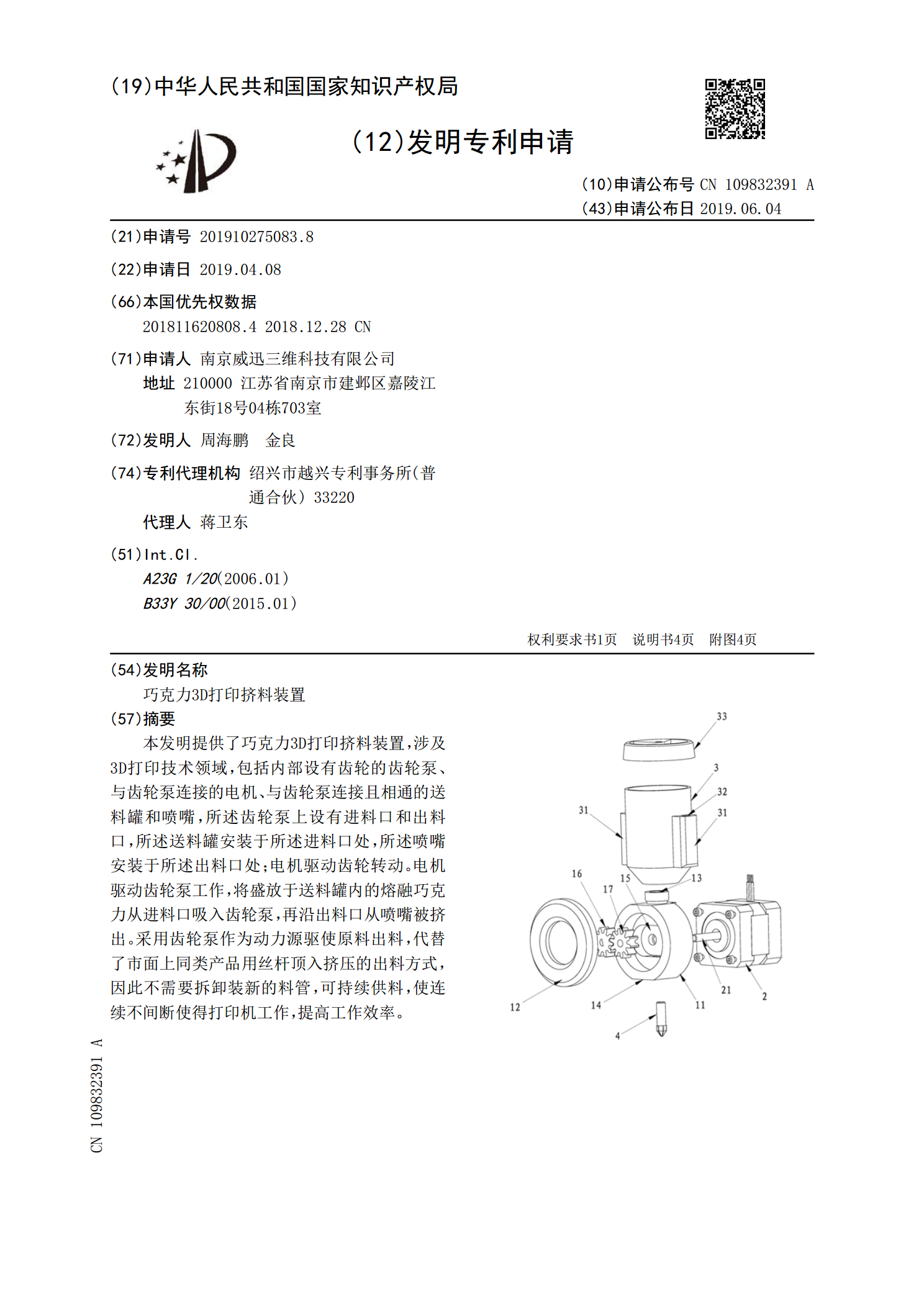
本发明提供了巧克力3D打印挤料装置,涉及3D打印技术领域,包括内部设有齿轮的齿轮泵、与齿轮泵连接的电机、与齿轮泵连接且相通的送料罐和喷嘴,所述齿轮泵上设有进料口和出料口,所述送料罐安装于所述进料口处,所述喷嘴安装于所述出料口处;电机驱动齿轮转动。电机驱动齿轮泵工作,将盛放于送料罐内的熔融巧克力从进料口吸入齿轮泵,再沿出料口从喷嘴被挤出。采用齿轮泵作为动力源驱使原料出料,代替了市面上同类产品用丝杆顶入挤压的出料方式,因此不需要拆卸装新的料管,可持续供料,使连续不间断使得打印机工作,提高工作效率。
3D打印机机头内挤料步进电机的控制方法.pdf
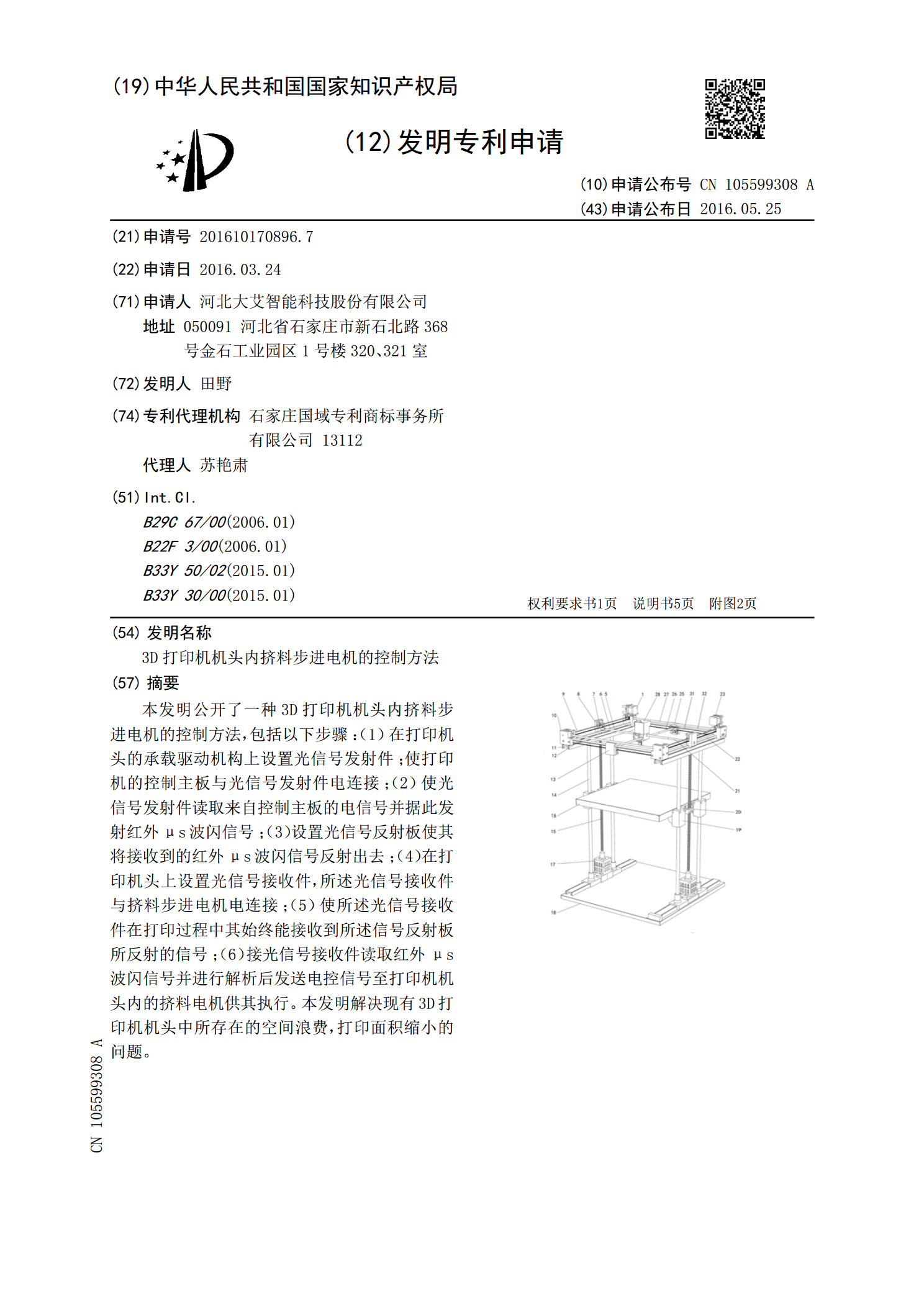
本发明公开了一种3D打印机机头内挤料步进电机的控制方法,包括以下步骤:(1)在打印机头的承载驱动机构上设置光信号发射件;使打印机的控制主板与光信号发射件电连接;(2)使光信号发射件读取来自控制主板的电信号并据此发射红外μs波闪信号;(3)设置光信号反射板使其将接收到的红外μs波闪信号反射出去;(4)在打印机头上设置光信号接收件,所述光信号接收件与挤料步进电机电连接;(5)使所述光信号接收件在打印过程中其始终能接收到所述信号反射板所反射的信号;(6)接光信号接收件读取红外μs波闪信号并进行解析后发送电控信号