
基于双向对称滑动丝杆与铰杆增力机构的绿色伺服夹具.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双向对称滑动丝杆与铰杆增力机构的绿色伺服夹具.docx
基于双向对称滑动丝杆与铰杆增力机构的绿色伺服夹具一、引言伺服夹具作为机器人制造中重要的一环,其功能是通过夹持和放开工件实现自动化。随着绿色制造理念的广泛应用,伺服夹具需要具备更高的精度和稳定性,减少碳排放,提高经济效益,这就需要使用一种新型的增力机构。本文将介绍一种基于双向对称滑动丝杆与铰杆增力机构的绿色伺服夹具。二、设计原则为了满足绿色制造理念和伺服夹具的基本要求,我们的设计应该符合以下原则:1.高效节能:减少能源消耗,提高能源利用效率。2.精度高:能够夹住各种形状的工件,并且其夹紧力在变化时能够保持较

基于液压缸的铰杆—杠杆增力双向夹紧液压夹具.docx
基于液压缸的铰杆—杠杆增力双向夹紧液压夹具液压夹具是工业生产中常用的夹紧设备之一,可以将工件固定在加工设备上进行加工,提高生产效率和产品质量。其中,液压缸的应用是夹紧装置中重要的组成部分,可以实现大力矩输出并且具有良好的控制性能。本文以基于液压缸的铰杆—杠杆增力双向夹紧液压夹具为例,介绍其工作原理、设计和应用。一、工作原理液压夹紧装置主要由执行杆、夹紧钳、活塞和密封件等组成。其中,液压缸作为执行杆,通过液压系统将油液驱动执行杆来实现力的输出。夹紧钳是夹紧工件的主要装置,通常采用U型和V型夹具,夹具夹紧工件

利用滚滑-铰杆增力机构的双工位夹具设计与分析.docx
利用滚滑-铰杆增力机构的双工位夹具设计与分析滚滑-铰杆增力机构在工业制造领域中的应用越来越广泛。其中,双工位夹具是一种常见的应用方式。本文将围绕利用滚滑-铰杆增力机构的双工位夹具设计与分析展开深入论述,从问题背景、夹具设计、分析方法和结论等方面进行全面介绍。一、问题背景随着工业制造中对精度和效率要求的不断提高,夹具作为工件加工和装配过程中的重要辅助装置,对于确保工艺质量的稳定性和提高生产效率起着至关重要的作用。然而,传统的夹具在操作过程中存在一定的局限性,如固定方向单一、精度受限等问题。而滚滑-铰杆增力机
一种基于液压缸的铰杆一杠杆增力双向夹紧液压夹具.pdf
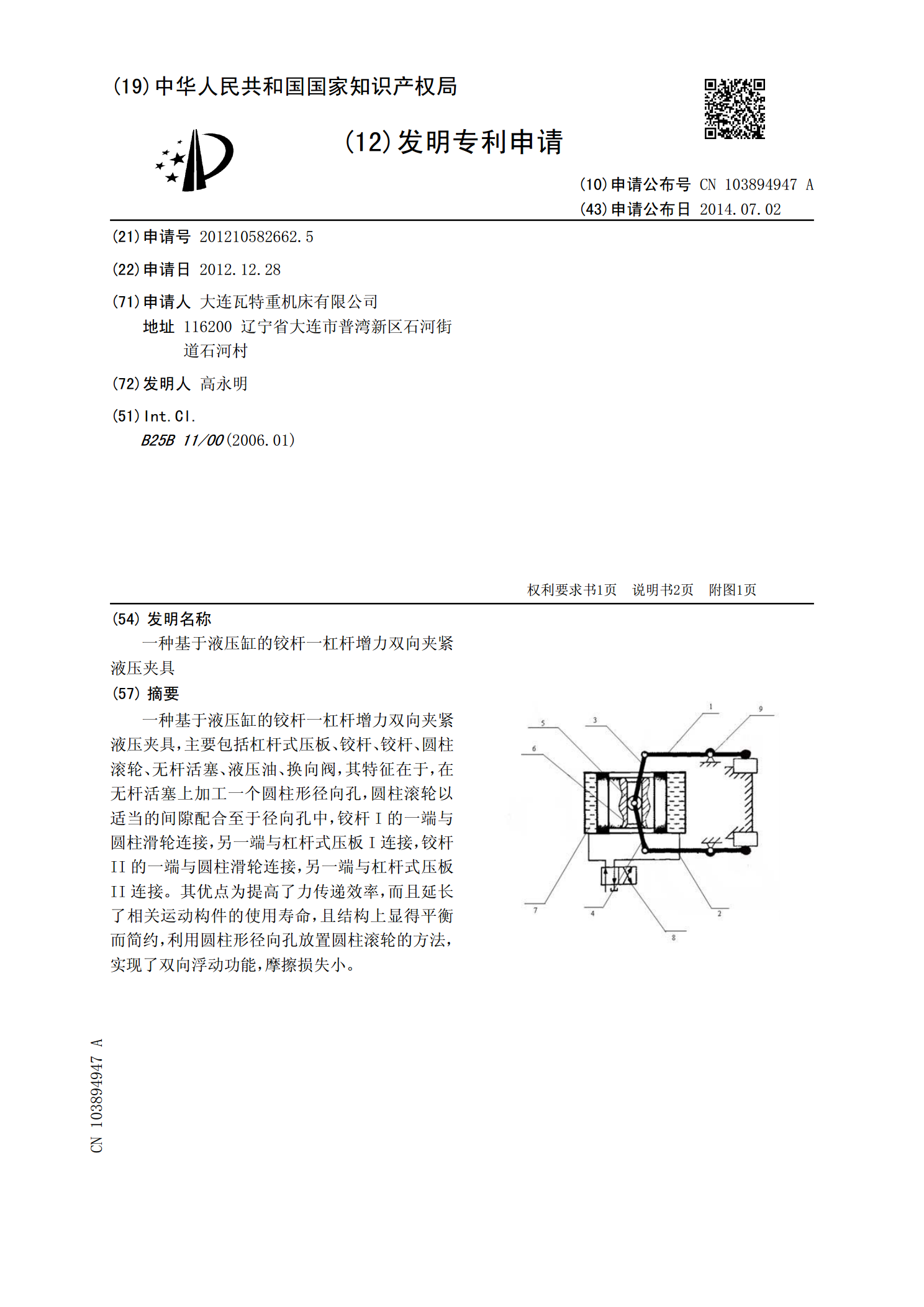
一种基于液压缸的铰杆一杠杆增力双向夹紧液压夹具,主要包括杠杆式压板、铰杆、铰杆、圆柱滚轮、无杆活塞、液压油、换向阀,其特征在于,在无杆活塞上加工一个圆柱形径向孔,圆柱滚轮以适当的间隙配合至于径向孔中,铰杆I的一端与圆柱滑轮连接,另一端与杠杆式压板I连接,铰杆II的一端与圆柱滑轮连接,另一端与杠杆式压板II连接。其优点为提高了力传递效率,而且延长了相关运动构件的使用寿命,且结构上显得平衡而简约,利用圆柱形径向孔放置圆柱滚轮的方法,实现了双向浮动功能,摩擦损失小。

铰杆——斜楔式气动夹具增力机构设计及力学分析.docx
铰杆——斜楔式气动夹具增力机构设计及力学分析摘要:本文主要介绍了一种斜楔式气动夹具增力机构的设计及力学分析。首先,对夹具的工作原理和增力机构的设计思路进行了分析和讨论。然后,通过对夹具增力机构中斜楔的应力分析和实验验证,证实了该增力机构可以有效地增加夹具的夹紧力。最后,结合工程应用实例,说明了该增力机构在实际生产中的应用前景。关键词:气动夹具,增力机构,斜楔,应力分析,实验验证引言:气动夹具在现代制造业中具有广泛的应用,主要用于定位、夹紧和支撑工件。然而,在一些特殊的情况下,夹具的夹紧力无法满足生产需求。