
基于势场蚁群算法的无人工程机械路径规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于势场蚁群算法的无人工程机械路径规划.docx
基于势场蚁群算法的无人工程机械路径规划基于势场蚁群算法的无人工程机械路径规划摘要:无人工程机械在现代工程建设中起着越来越重要的作用,但路径规划仍然是一个具有挑战性的问题。传统的路径规划算法往往忽视了环境的动态特性和机器人的移动能力。因此,本文提出了一种基于势场蚁群算法的路径规划方法,该方法综合考虑了环境信息和机器人移动能力,能够有效解决无人工程机械的路径规划问题。引言:无人工程机械是指能够在工程建设中替代人力完成某些重复、危险或繁琐任务的机械设备。它具有高效、精准和灵活等特点,在工程建设中被广泛应用。然而

基于势场蚁群算法的无人工程机械路径规划的任务书.docx
基于势场蚁群算法的无人工程机械路径规划的任务书任务书一、任务背景无人工程机械在建筑、采矿等领域中得到了广泛应用。无人工程机械的运动路径规划是保证其自主运动和操作的基础,它不仅能够提高机械自主控制能力和运动精度,还能够减小对人工调度的依赖,提高施工效率和安全性。但是,无人工程机械运动路径规划存在一定困难,主要体现在路径规划算法的选择与性能指标的选择方面。传统的路径规划算法,如A*算法,Dijkstra算法等,需要预先构建全局地图并且计算出每一个点之间的距离,这种方法适合于静态环境下的路径规划。但是,实际环境

基于势场蚁群算法的机器人全局路径规划.docx
基于势场蚁群算法的机器人全局路径规划一、前言随着机器人技术的不断发展,机器人已经成为日常生活中不可或缺的一部分。然而,机器人在其运动的过程中,需要处理大量的运动控制、状态估计、感知与识别等问题。全局路径规划是机器人技术领域中一个非常重要的问题,它负责为机器人规划一条最优的、可行的路径,使机器人能够在避免障碍物的同时到达目标点。因此,本文将介绍一种基于势场蚁群算法的机器人全局路径规划方法。二、背景机器人全局路径规划问题是机器人领域中的核心之一,这是因为机器人在执行任务过程中通常都需要通过避开障碍物,到达目标
一种基于势场蚁群算法的路径规划方法.pdf
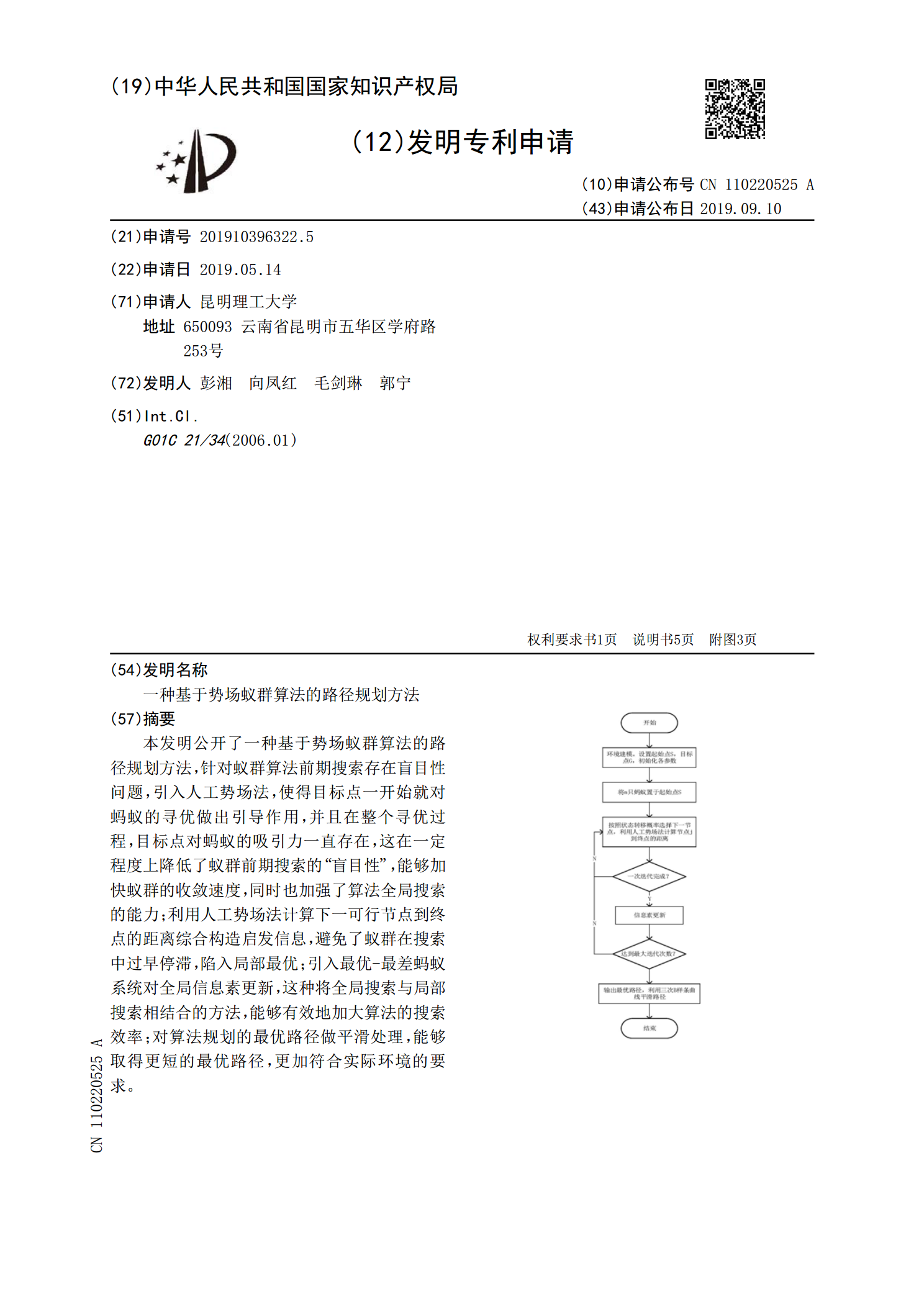
本发明公开了一种基于势场蚁群算法的路径规划方法,针对蚁群算法前期搜索存在盲目性问题,引入人工势场法,使得目标点一开始就对蚂蚁的寻优做出引导作用,并且在整个寻优过程,目标点对蚂蚁的吸引力一直存在,这在一定程度上降低了蚁群前期搜索的“盲目性”,能够加快蚁群的收敛速度,同时也加强了算法全局搜索的能力;利用人工势场法计算下一可行节点到终点的距离综合构造启发信息,避免了蚁群在搜索中过早停滞,陷入局部最优;引入最优‑最差蚂蚁系统对全局信息素更新,这种将全局搜索与局部搜索相结合的方法,能够有效地加大算法的搜索效率;对算

基于改进势场蚁群算法的自动引导小车路径规划研究.docx
基于改进势场蚁群算法的自动引导小车路径规划研究基于改进势场蚁群算法的自动引导小车路径规划研究摘要:随着智能交通系统的发展,自动引导小车在物流和仓储领域的应用越来越广泛。然而,传统的路径规划算法在复杂环境下的性能较差。为了解决这个问题,本文提出了一种基于改进势场蚁群算法的自动引导小车路径规划方法。该方法继承了势场蚁群算法的优势,同时引入了新的启发式信息,在复杂环境下能够更好地选择路径,提高路径规划的效果和速度。关键词:自动引导小车,路径规划,势场蚁群算法,启发式信息1.引言自动引导小车是一种能够自主导航和运