
基于FX3U系列PLC和伺服电缸的定位控制系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于FX3U系列PLC和伺服电缸的定位控制系统设计.docx
基于FX3U系列PLC和伺服电缸的定位控制系统设计概述随着自动化技术的快速发展,越来越多的机器设备采用了PLC和伺服电缸控制系统。PLC即可编程序控制器,其功能强大,可以实现工厂自动化控制系统中大多数功能。而伺服电缸能够提供高精度的定位控制和稳定的运动性能,因此被广泛应用于各种自动化设备的运动控制中。本文主要介绍基于FX3U系列PLC和伺服电缸的定位控制系统设计。设计概述基于FX3U系列PLC和伺服电缸的定位控制系统,主要由PLC、伺服电缸、编码器和驱动模块等组成。其中PLC作为系统的核心,控制整个控制系
基于三菱FX3U系列PLC的伺服控制系统设计.pdf
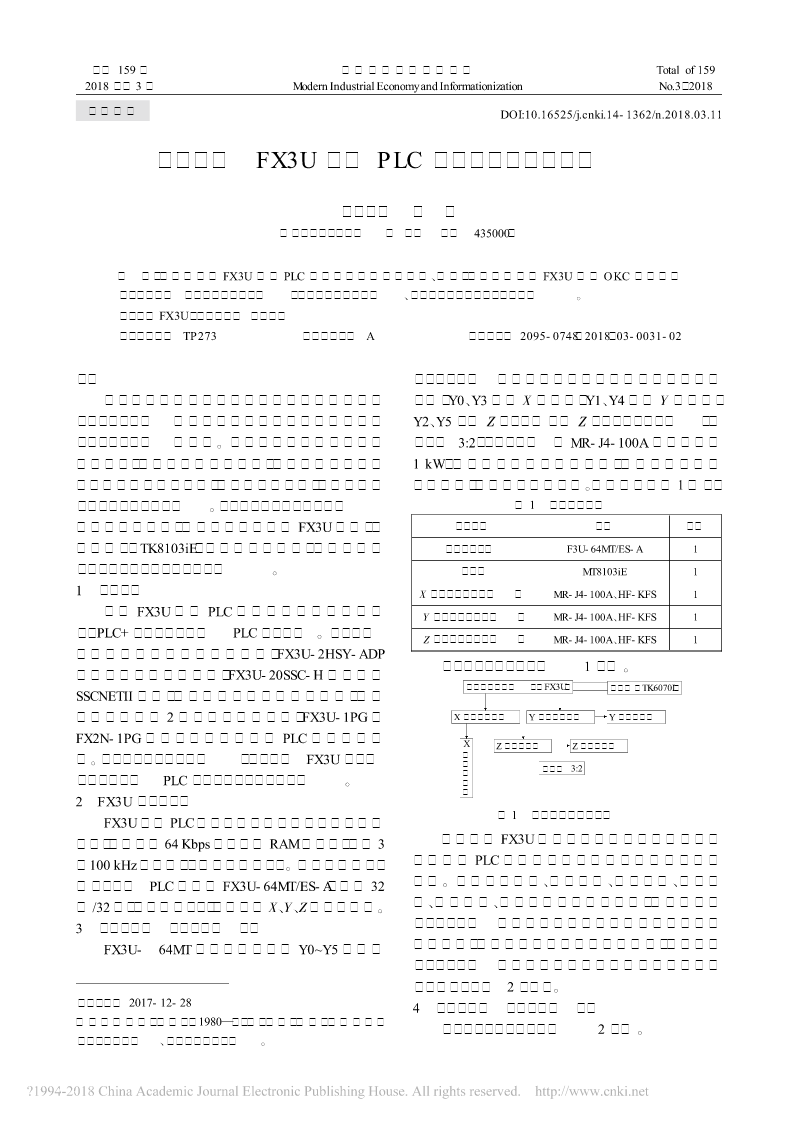
总第159期现代工业经济和信息化Totalof1592018年第3期ModernIndustrialEconomyandInformationizationNo.3,2018工业设计DOI:10.16525/j.cnki.14-1362/n.2018.03.11基于三菱FX3U系列PLC的伺服控制系统设计廖广益,崔静(湖北工程职业学院,湖北黄石435000)摘要:首先阐述了FX3U系列PLC对三轴位移控制的原理、方法,然后提出基于FX3U系列OKC的伺服控制系统设计,最后通过一系列测试,证明本系统运行稳定

基于三菱FX3U系列PLC的伺服控制系统设计.docx
基于三菱FX3U系列PLC的伺服控制系统设计标题:基于三菱FX3U系列PLC的伺服控制系统设计摘要:本论文以基于三菱FX3U系列PLC的伺服控制系统设计为课题,介绍了PLC的基本原理、伺服控制的基本概念和设计方法,同时详细分析了三菱FX3U系列PLC的特点以及其在伺服控制系统中的应用。通过对伺服控制系统的设计和实施,验证了基于三菱FX3U系列PLC的伺服控制系统设计的可行性和有效性。关键词:三菱FX3U系列PLC;伺服控制系统;设计;应用1.引言伺服控制系统在现代自动化领域中起着至关重要的作用。PLC作为

基于三菱FX3U系列PLC的伺服控制系统设计.pdf
总第159期现代工业经济和信息化Totalof1592018年第3期ModernIndustrialEconomyandInformationizationNo.3,2018工业设计DOI:10.16525/j.cnki.14-1362/n.2018.03.11基于三菱FX3U系列PLC的伺服控制系统设计廖广益,崔静(湖北工程职业学院,湖北黄石)435000摘要:首先阐述了FX3U系列PLC对三轴位移控制的原理、方法,然后提出基于FX3U系列OKC的伺服控制系统设计,最后通过一系列测试,证明本系统运行稳定

基于PLC和伺服控制的液压装缸机控制系统设计.docx
基于PLC和伺服控制的液压装缸机控制系统设计近年来,随着自动化技术的不断发展和应用,液压装缸机控制系统的设计也逐渐成为研究的热点。本文主要以PLC和伺服控制技术为基础,研究液压装缸机控制系统的设计。一、液压装缸机的工作原理液压装缸机是通过压缩液体来实现机械动作的一种机械设备。该设备主要由液压泵、油箱、液压缸、控制阀和管路等部分组成,其工作原理如下:1.液压泵将液体从油箱中吸入,经过压缩后,将高压液体送向液压缸。2.液压缸受到高压液体的作用,通过活塞将机械设备或工件向前推动或拉动。3.控制阀控制液体的流向和