
修井作业立式翻转猫道受力特性研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

修井作业立式翻转猫道受力特性研究.docx
修井作业立式翻转猫道受力特性研究修井作业立式翻转猫道受力特性研究摘要:立式翻转猫道在修井作业中扮演着重要的角色。为了研究猫道在修井作业中的受力特性,本文从力学的角度出发,通过理论分析和实验研究,探讨了猫道的受力特性和相关参数对猫道稳定性和性能的影响。结果表明,在设计和使用猫道时,应当考虑以下因素:猫道的尺寸、材料强度、形状和支撑结构等。此研究可为修井作业中的猫道设计和使用提供理论依据和实践指导。关键词:修井作业,立式翻转猫道,受力特性,稳定性,性能引言:修井作业是石油行业中的重要工作之一,其中修井井下作业
一种井口定位的集成导向式立式作业修井猫道及使用方法.pdf
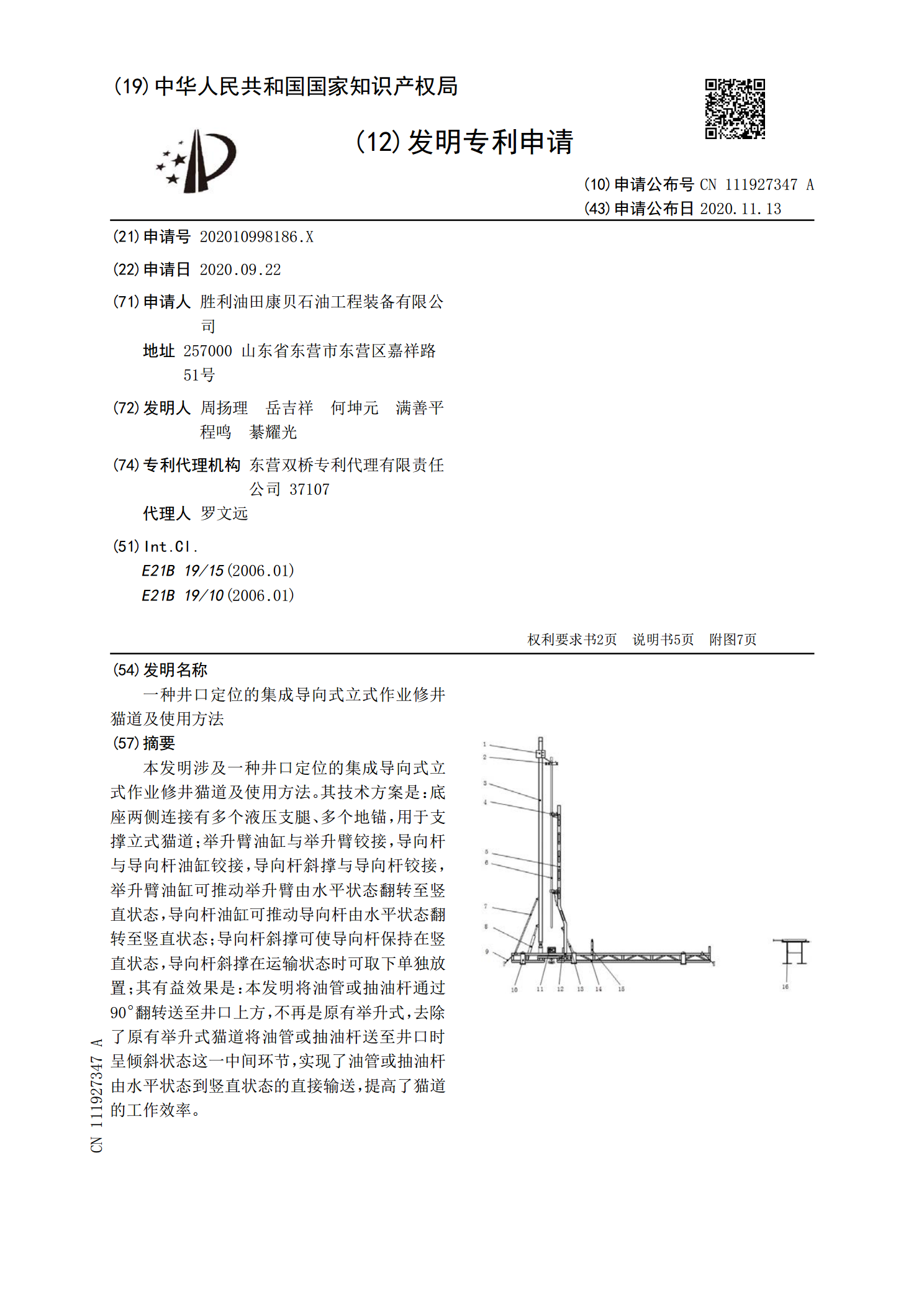
本发明涉及一种井口定位的集成导向式立式作业修井猫道及使用方法。其技术方案是:底座两侧连接有多个液压支腿、多个地锚,用于支撑立式猫道;举升臂油缸与举升臂铰接,导向杆与导向杆油缸铰接,导向杆斜撑与导向杆铰接,举升臂油缸可推动举升臂由水平状态翻转至竖直状态,导向杆油缸可推动导向杆由水平状态翻转至竖直状态;导向杆斜撑可使导向杆保持在竖直状态,导向杆斜撑在运输状态时可取下单独放置;其有益效果是:本发明将油管或抽油杆通过90°翻转送至井口上方,不再是原有举升式,去除了原有举升式猫道将油管或抽油杆送至井口时呈倾斜状态这

修井机司钻工操纵作业疲劳特性研究.docx
修井机司钻工操纵作业疲劳特性研究修井机司钻工操纵作业疲劳特性研究摘要:修井机司钻工是在油田钻井作业中承担重要角色的作业人员,其作业过程中可能面临疲劳情况,影响工作效率和安全性。本文以修井机司钻工操纵作业疲劳特性为研究对象,分析其疲劳产生的原因和影响因素,并提供相应的解决方案,旨在提高工作效率和人员安全。1.引言修井机司钻工作为在钻井作业中操控修井机的关键人员,其操作技能和精准度直接影响着修井过程的效率和质量。然而,长时间的操纵作业容易导致疲劳和注意力不集中,从而影响工作效率和安全性。因此,研究修井机司钻工

自动猫道机起升钢丝绳受力特性研究.docx
自动猫道机起升钢丝绳受力特性研究摘要本文针对自动猫道机起升钢丝绳的受力特性进行研究,通过实验和数值模拟的方法,对钢丝绳的静态和动态特性进行了分析。实验结果表明,钢丝绳的承载能力随着钢丝数量的增加而增加,而当钢丝数量达到一定值时其承载能力的提高趋势将趋于平缓;同时,在起升过程中,随着起重物体的重量增加,钢丝绳的应变和应力逐渐增大,超过其允许的极限值时会发生破断事故。数值模拟结果与实验结果基本一致,验证了该方法的有效性。为保障自动猫道机的安全运行,建议加强钢丝绳的定期检测和维护。关键词:自动猫道机,起升钢丝绳

修井作业V型管槽的受力仿真分析.docx
修井作业V型管槽的受力仿真分析【摘要】本文主要针对修井作业中V型管槽的受力情况进行分析,通过有限元仿真模拟,得出了该结构在不同受力条件下的应力分布图和变形分析图。通过计算机模拟,得到了该结构存在的潜在问题,并提出了相应的解决方案,为修井作业提供了可靠的理论指导。【关键词】修井作业,V型管槽,有限元仿真,应力分布,变形分析【Introduction】随着石油行业的发展,越来越多的油田需要进行修井作业。在修井过程中,V型管槽作为一种常见的结构,被广泛应用于井口附近的沉积物处理过程中。然而,由于受到不同的力学影