
电机驱动和液压驱动精选幻灯片.ppt

lj****88


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共41页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电机驱动和液压驱动精选幻灯片.ppt
2.1机器人机械设计的步骤3、结构设计包括机器人驱动系统、传动系统的配置及结构设计,关节及杆件的结构设计,平衡机构的设计,走线及电器接口设计等。2.2工业机器人的驱动与传动系统结构1—码盘;2—测速机;3—电机;4—联轴器;5—传动装置;6—转动关节;7—杆1.电动驱动器电动驱动器的能源简单,速度变化范围大,效率高,速度和位置精度都很高。但它们多与减速装置相联,直接驱动比较困难。电动驱动器又可分为直流(DC)、交流(AC)伺服电机驱动和步进电机驱动。直流伺服电机有很多优点,但它的电刷易磨损,且易形成火花。

电机驱动和液压驱动.ppt
2.1机器人机械设计的步骤3、结构设计包括机器人驱动系统、传动系统的配置及结构设计,关节及杆件的结构设计,平衡机构的设计,走线及电器接口设计等。2.2工业机器人的驱动与传动系统结构1—码盘;2—测速机;3—电机;4—联轴器;5—传动装置;6—转动关节;7—杆1.电动驱动器电动驱动器的能源简单,速度变化范围大,效率高,速度和位置精度都很高。但它们多与减速装置相联,直接驱动比较困难。电动驱动器又可分为直流(DC)、交流(AC)伺服电机驱动和步进电机驱动。直流伺服电机有很多优点,但它的电刷易磨损,且易形成火花。

电机驱动和液压驱动。.ppt
1234567891011121314151617181920212223242526272829303132333435363738394041
电机驱动控制装置和电机驱动控制方法.pdf
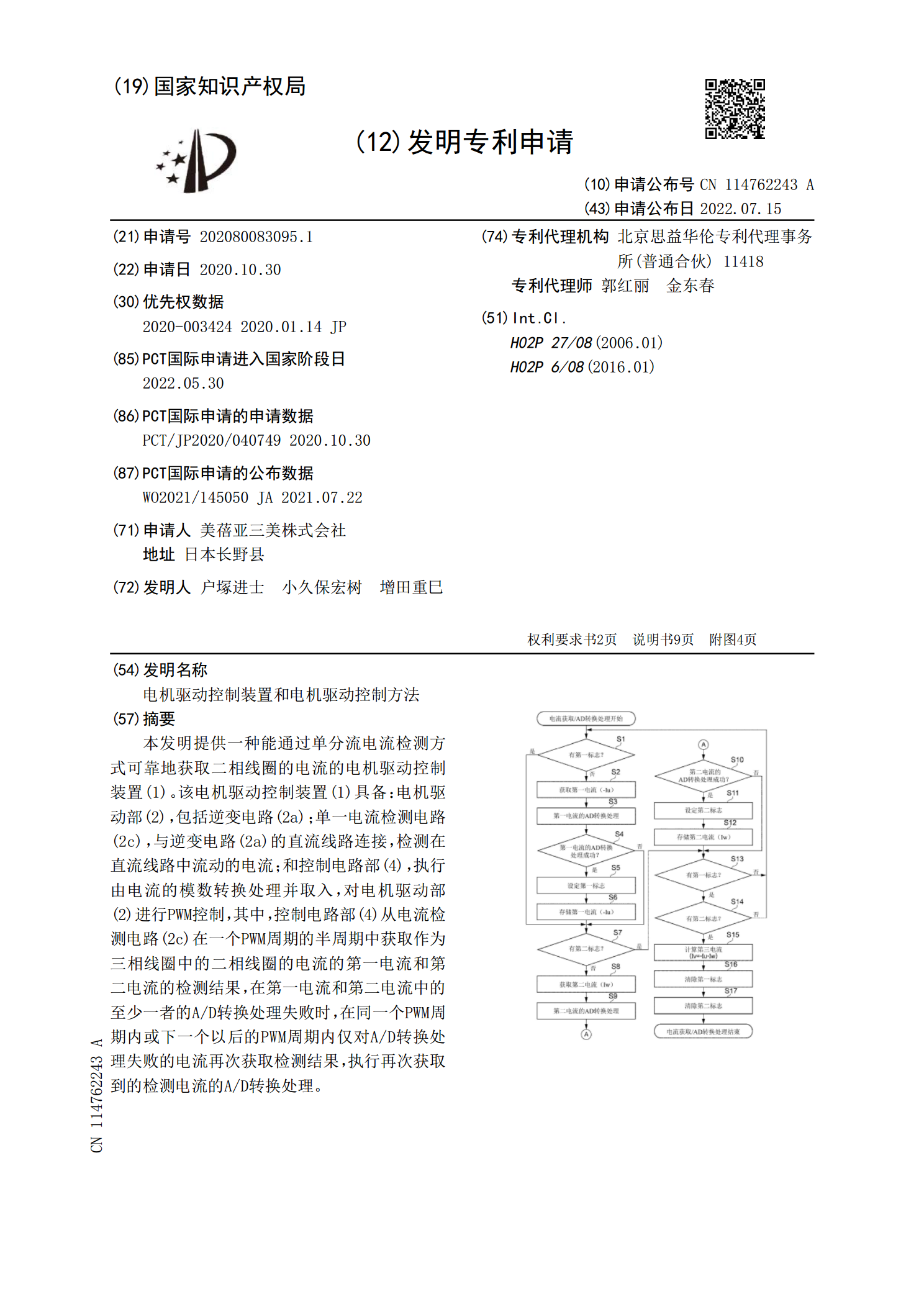
本发明提供一种能通过单分流电流检测方式可靠地获取二相线圈的电流的电机驱动控制装置(1)。该电机驱动控制装置(1)具备:电机驱动部(2),包括逆变电路(2a);单一电流检测电路(2c),与逆变电路(2a)的直流线路连接,检测在直流线路中流动的电流;和控制电路部(4),执行由电流的模数转换处理并取入,对电机驱动部(2)进行PWM控制,其中,控制电路部(4)从电流检测电路(2c)在一个PWM周期的半周期中获取作为三相线圈中的二相线圈的电流的第一电流和第二电流的检测结果,在第一电流和第二电流中的至少一者的A/D转

回转设备液压驱动装置和驱动方法.pdf
本发明公开了一种回转设备液压驱动装置和驱动方法,其涉及油气开采技术领域,装置包括:壳体,壳体内具有环形空腔;至少部分设置在空腔中的回转体,回转体上安装有夹持件和驱动夹持件移动的液压油缸,回转体的侧壁上具有齿圈;能与齿圈相啮合以驱动回转体转动的动力机构;对驱动夹持件移动的液压油缸进行供油和保压的液压系统,液压系统中至少包括:用于驱动液压油流动的泵、驱动所述夹持件的第一液压油缸;设置在壳体上的导轨、马达以及驱动马达移动的第二液压油缸,马达设置在导轨上可在第二液压油缸的驱动下沿着导轨滑动。本申请在安装在回转体上