
基于BP神经网络的自整定PID控制仿真.doc

运升****魔王

1/6
2/6

3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于BP神经网络的自整定PID控制仿真.doc
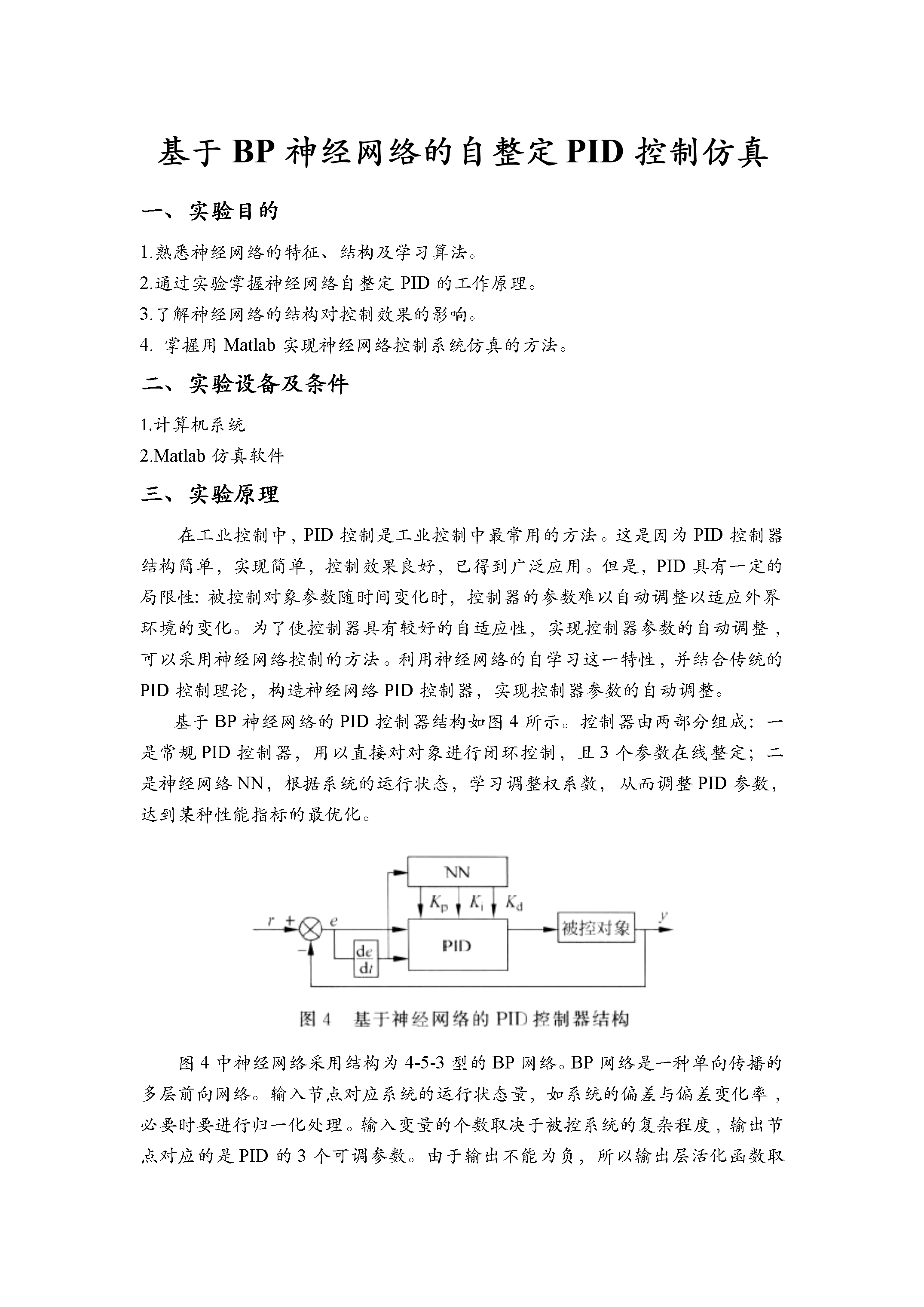
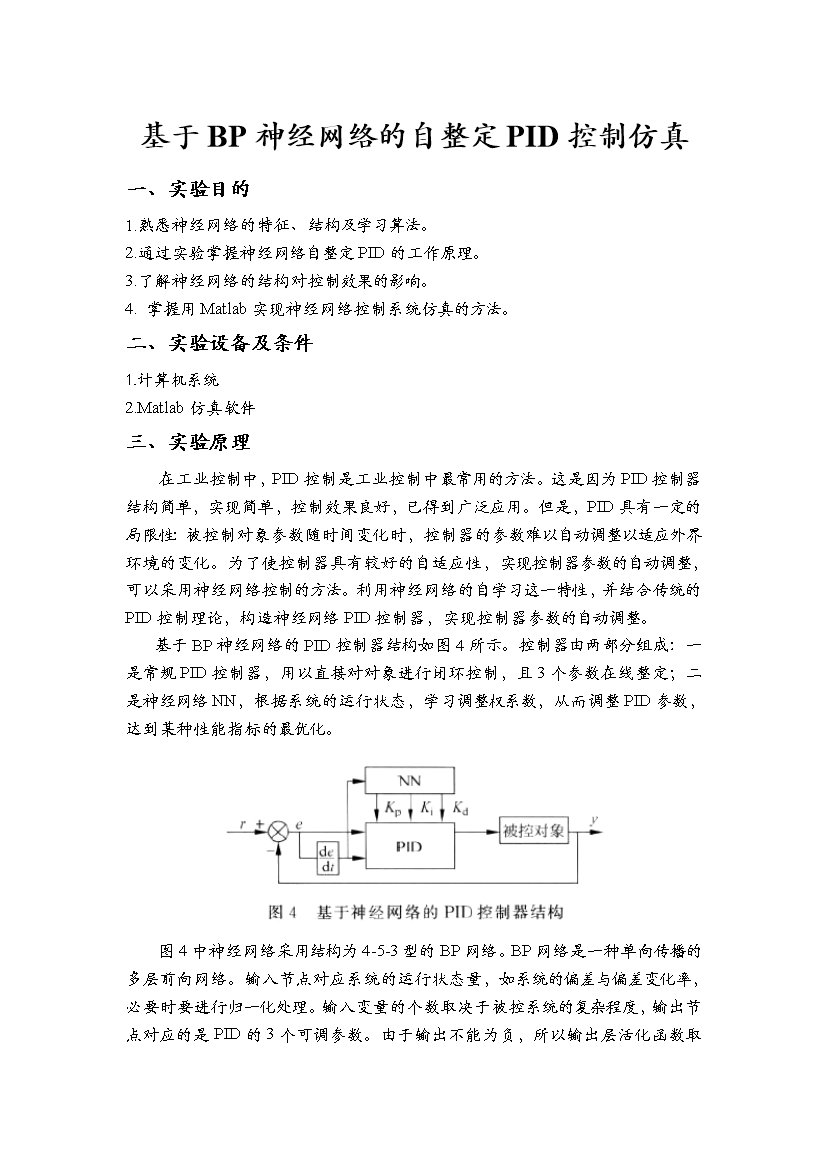
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。2.通过实验掌握神经网络自整定PID的工作原理。3.了解神经网络的结构对控制效果的影响。4.掌握用Matlab实现神经网络控制系统仿真的方法。二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中PID控制是工业控制中最常用的方法。这是因为PID控制器结构简单实现简单控制效果良好已得到广泛应用。但是PID具有一定的局限性:被控制对象参数随时间变化时控制器的参数难以自动调整以适应外界环境的变
基于BP神经网络的自整定PID控制仿真.doc
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。2.通过实验掌握神经网络自整定PID的工作原理。3.了解神经网络的结构对控制效果的影响。4.掌握用Matlab实现神经网络控制系统仿真的方法。二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外
基于BP神经网络的自整定PID控制仿真.doc
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。2.通过实验掌握神经网络自整定PID的工作原理。3.了解神经网络的结构对控制效果的影响。4.掌握用Matlab实现神经网络控制系统仿真的方法。二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中PID控制是工业控制中最常用的方法。这是因为PID控制器结构简单实现简单控制效果良好已得到广泛应用。但是PID具有一定的局限性:被控制对象参数随时间变化时控制器的参数难以自动调整以适应外界环境的变
基于BP神经网络的自整定PID控制仿真.doc
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。2.通过实验掌握神经网络自整定PID的工作原理。3.了解神经网络的结构对控制效果的影响。4.掌握用Matlab实现神经网络控制系统仿真的方法。二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中PID控制是工业控制中最常用的方法。这是因为PID控制器结构简单实现简单控制效果良好已得到广泛应用。但是PID具有一定的局限性:被控制对象参数随时间变化时控制器的参数难以自动调整以适应外界环境的变

基于-BP-神经网络自整定-PID-控制仿真.doc
实验二基于BP神经网络自整定PID控制仿真一、实验目的熟悉神经网络的特征、结构以及学习算法,通过实验掌握神经网络自整定PID的工作原理。了解神经网络的结构对控制效果的影响,掌握用MATLAB实现神经网络控制系统仿真的方法。二、实验原理在工业控制中,PID控制是工业控制中最常用的方法。这是因为PID控制器结构简单、实现简单,控制效果良好,已得到广泛应用。但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。为了使控制器具有较好的自适应性,实现控制器参数的自动