
伺服驱动装置.ppt

lj****88


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共150页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

伺服驱动装置.ppt
电机应用于移动型工作台、绘图机、打印机、复印机、扫描仪等设备和计算机外设的驱动。伺服系统基本概念执行装置及其分类电气伺服驱动装置电气伺服驱动装置液压伺服驱动装置液压伺服驱动装置气压伺服驱动装置气压伺服驱动装置各执行装置的性能比较伺服系统的分类控制脉冲的数量、频率等,便可控制执行件运动的位移、速度和运动方向。系统精度主要取决于——步进电机的角位移精度;齿轮、丝杠等传动元件的精度以及系统的摩擦、阻尼等特性。特点:结构简单,调试、维修方便,成本低廉,但精度较差,一般用于经济型数控设备。闭环伺服系统☆与开环系统最
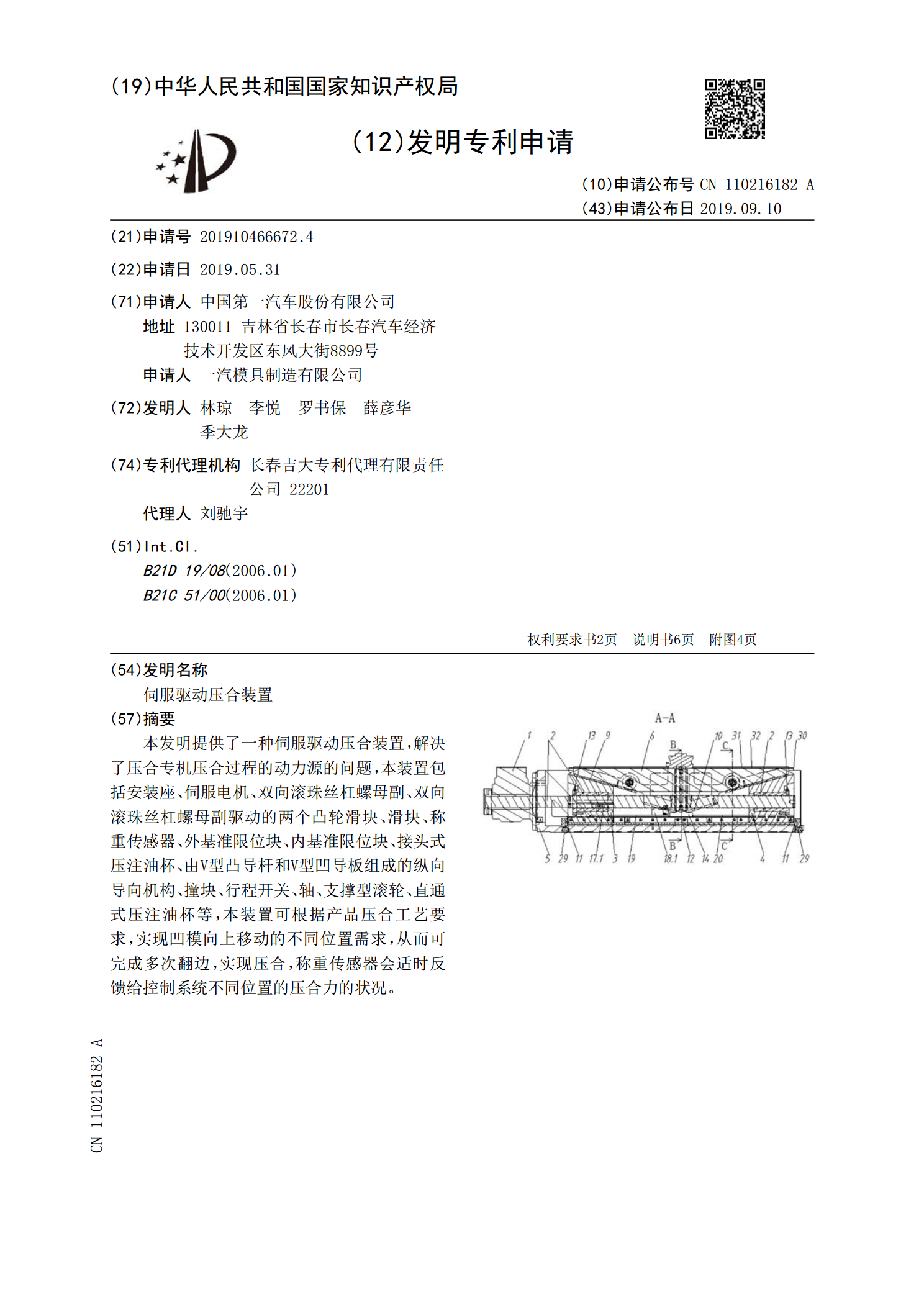
伺服驱动压合装置.pdf
本发明提供了一种伺服驱动压合装置,解决了压合专机压合过程的动力源的问题,本装置包括安装座、伺服电机、双向滚珠丝杠螺母副、双向滚珠丝杠螺母副驱动的两个凸轮滑块、滑块、称重传感器、外基准限位块、内基准限位块、接头式压注油杯、由V型凸导杆和V型凹导板组成的纵向导向机构、撞块、行程开关、轴、支撑型滚轮、直通式压注油杯等,本装置可根据产品压合工艺要求,实现凹模向上移动的不同位置需求,从而可完成多次翻边,实现压合,称重传感器会适时反馈给控制系统不同位置的压合力的状况。

伺服驱动器的防震装置.pdf
本发明公开一种伺服驱动器的防震装置,包括基板、第一弹性组件和第二弹性组件;基板包括用于固定伺服驱动器本体的上基板和下基板,下基板上设有多个容纳腔,第一弹性组件包括固定于上基板的第一连接杆、固定于下基板的第二连接杆以及连接第一连接杆和第二连接杆的第一弹性件,第二弹性组件包括多个支撑杆、多个第二弹性件和多个转动板,支撑杆包括固定于上基板的固定部、与转动板连接的转动部和安装部,第二弹性件的一端固定于安装部,第二弹性件的另一端固定于下基板;本发明技术方案通过在上基板和下基板之间设置第一弹性组件和第二弹性组件来增加
造型机伺服驱动装置.pdf
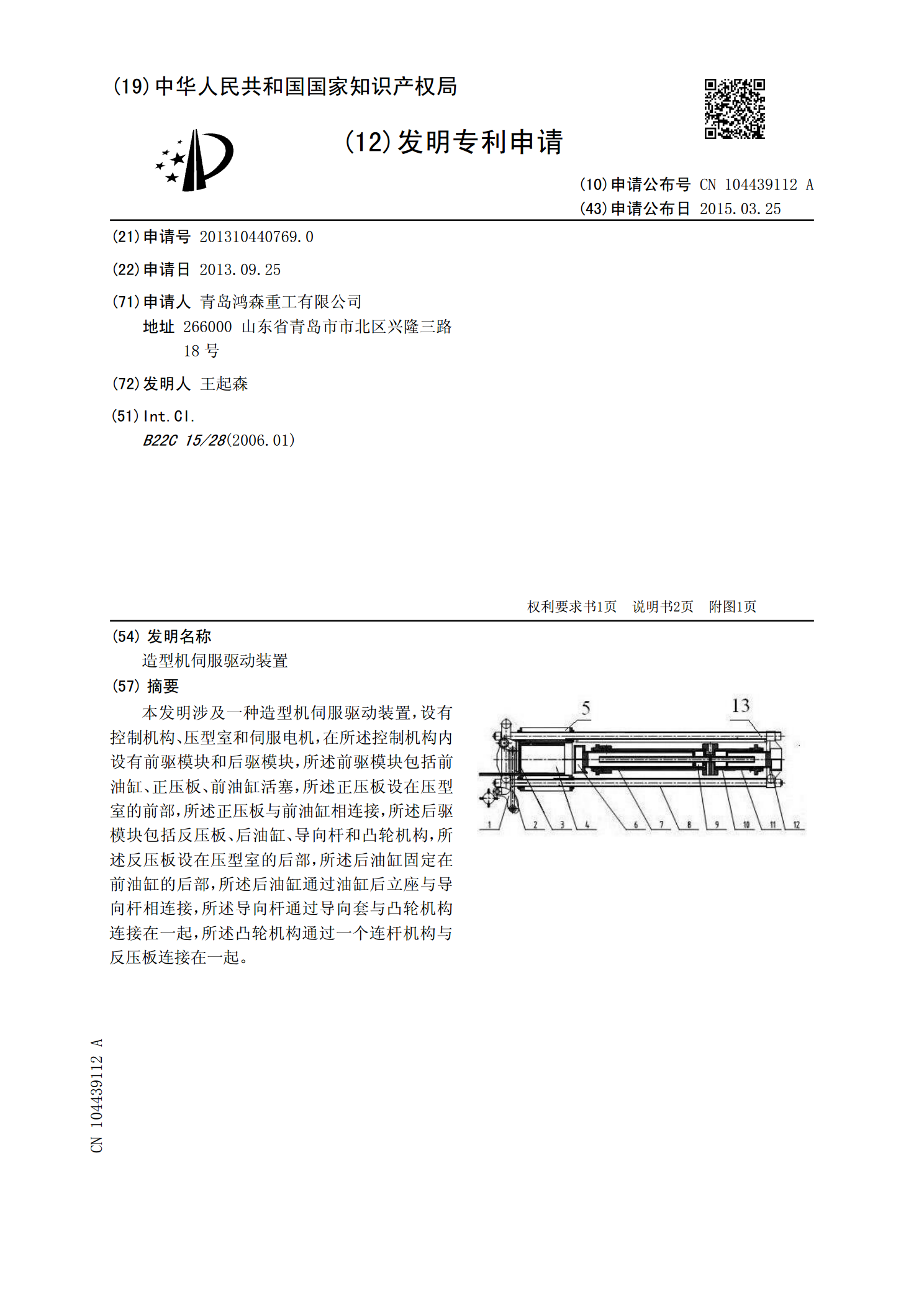
本发明涉及一种造型机伺服驱动装置,设有控制机构、压型室和伺服电机,在所述控制机构内设有前驱模块和后驱模块,所述前驱模块包括前油缸、正压板、前油缸活塞,所述正压板设在压型室的前部,所述正压板与前油缸相连接,所述后驱模块包括反压板、后油缸、导向杆和凸轮机构,所述反压板设在压型室的后部,所述后油缸固定在前油缸的后部,所述后油缸通过油缸后立座与导向杆相连接,所述导向杆通过导向套与凸轮机构连接在一起,所述凸轮机构通过一个连杆机构与反压板连接在一起。

液压伺服驱动装置以及利用该液压伺服驱动装置的可变涡轮增压器.pdf
本发明提供一种液压伺服驱动装置以及利用该液压伺服驱动装置的可变涡轮增压器,该液压伺服驱动装置构成为具有:利用先导压力滑动且在油的供给和截断油的供给之间进行切换的先导滑阀(20)、跟随先导滑阀(20)进行滑动的伺服活塞(11)、检测伺服活塞(11)的移动量的行程传感器(15)、用于使伺服活塞(11)移动的油流入的第一液压室(51)、将被供给来自泵的油的泵口与第一液压室(51)连通的第一活塞油路(65)以及将第一液压室(51)与排油口连通的排出循环油路(66)。