
车载激光移动测量系统空间校准方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车载激光移动测量系统空间校准方法研究.docx
车载激光移动测量系统空间校准方法研究一、引言车载激光移动测量系统是一种新型的高精度三维测量系统,其可广泛应用于道路勘测、城市规划、车辆自动化、地图制作等领域。其中,系统空间校准是确保测量精度的基础。本文将探讨车载激光移动测量系统的空间校准方法。二、车载激光移动测量系统的组成车载激光移动测量系统主要由激光雷达、惯性测量单元(IMU)、全球定位系统(GPS)和数字摄像机等组成。其中,激光雷达和IMU主要用于测量三维空间坐标信息,GPS则用于实现定位和导航,数字摄像机则用于采集场景图像信息。三、车载激光移动测量

车载激光移动测量系统空间校准方法研究的中期报告.docx
车载激光移动测量系统空间校准方法研究的中期报告本研究旨在研究车载激光移动测量系统的空间校准方法,以提高测量精度和可靠性。本次中期报告主要介绍了研究背景、研究内容、研究进展和下一步工作计划。一、研究背景车载激光移动测量系统是一种用于快速获取地面、建筑物等场景三维信息的测量方法,在城市规划、道路施工、建筑工程等领域有广泛应用。然而,由于车载测量系统的特殊性,如振动、姿态变化等,会对测量精度和可靠性产生影响,因此需要进行空间校准。二、研究内容本次研究主要探讨了如何通过车载测量系统的空间校准方法来提高测量精度和可
车载激光雷达数据校准方法、装置及系统.pdf
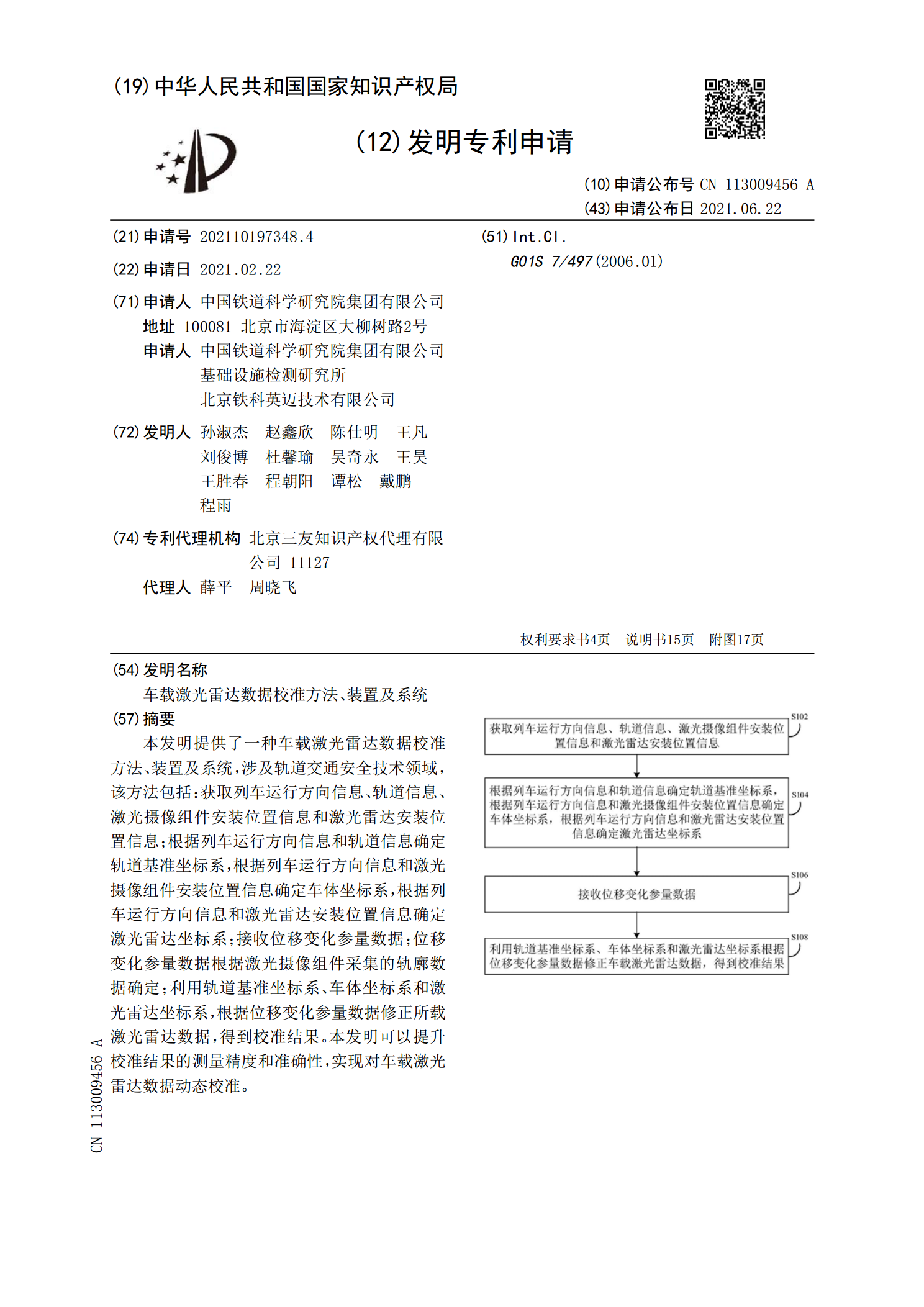
本发明提供了一种车载激光雷达数据校准方法、装置及系统,涉及轨道交通安全技术领域,该方法包括:获取列车运行方向信息、轨道信息、激光摄像组件安装位置信息和激光雷达安装位置信息;根据列车运行方向信息和轨道信息确定轨道基准坐标系,根据列车运行方向信息和激光摄像组件安装位置信息确定车体坐标系,根据列车运行方向信息和激光雷达安装位置信息确定激光雷达坐标系;接收位移变化参量数据;位移变化参量数据根据激光摄像组件采集的轨廓数据确定;利用轨道基准坐标系、车体坐标系和激光雷达坐标系,根据位移变化参量数据修正所载激光雷达数据,

车载激光扫描测量系统外标定方法的研究和实现.docx
车载激光扫描测量系统外标定方法的研究和实现车载激光扫描测量系统外标定方法的研究和实现摘要:车载激光扫描测量系统外标定方法的研究与实现对于车载激光扫描测量系统的准确性和可靠性具有重要意义。本论文通过对车载激光扫描测量系统的工作原理和标定方法进行详细介绍,并对现有的标定方法进行总结和评价。同时,本论文提出了一种基于于轨迹匹配的车载激光扫描测量系统外标定方法,并进行了实验验证,结果表明该方法具有较高的准确性和可靠性,能够满足车载激光扫描测量系统的实际需求。关键词:车载激光扫描测量系统;外标定;轨迹匹配一、引言车

基于车载激光雷达移动测量系统的山区DEM快速更新生产研究.docx
基于车载激光雷达移动测量系统的山区DEM快速更新生产研究近年来,地形高程数据在很多领域应用日益广泛,如土地利用、城市规划和自然灾害预测等。高精度数字高程模型(DEM)是实现这些领域的基础。然而,由于山区地形复杂、覆盖茂密植被等因素的干扰,传统的DEM获取方法不能很好地满足需求。此外,DEM的更新速度也是一个问题,因为山区地形变化较快,采用传统的测量方法更新DEM的效率和精度都无法得到保证。因此,本文提出了一种基于车载激光雷达移动测量系统的山区DEM快速更新的生产研究方法。一、车载激光雷达移动测量系统车载激