
电动拖拉机电动悬挂系统耕深控制研究综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电动拖拉机电动悬挂系统耕深控制研究综述报告.docx
电动拖拉机电动悬挂系统耕深控制研究综述报告随着农业现代化的不断推进,农机化也越来越受到农民的欢迎和推广。电动拖拉机凭借着其小巧灵活、节能环保、操作简单等优点,逐渐被广大用户所接受。而其中,电动悬挂系统作为电动拖拉机的重要组成部分,其对电动拖拉机的精准耕深控制起着至关重要的作用。本文对近年来电动拖拉机电动悬挂系统耕深控制研究进行了综述。1.悬挂系统的基本结构电动拖拉机电动悬挂系统一般由驱动电机、液压泵、液压缸、阀门和传感器等组成。整个系统的运行通过操纵系统的机电一体化控制,达到对拖拉机重心的控制,使耕深更加

电动拖拉机电动悬挂系统的设计与分析的中期报告.docx
电动拖拉机电动悬挂系统的设计与分析的中期报告中期报告-电动拖拉机电动悬挂系统的设计与分析一、项目背景随着社会和科技的发展,农业生产的水平也越来越高。电动拖拉机已经逐渐取代了传统的农用拖拉机,在实际应用中具有非常好的效果。但是,电动拖拉机依然面临一些重要的技术问题,如悬挂系统的设计和性能等方面的问题。因此,本项目旨在通过电动悬挂系统的研究和设计,为电动拖拉机的生产和性能提高做出贡献。二、研究目标1.设计一种高效、可靠的电动悬挂系统,以便优化电动拖拉机的性能;2.分析电动悬挂系统的裂纹、弯曲、疲劳等破坏形式及

电动拖拉机电动悬挂装置设计与试验研究.docx
电动拖拉机电动悬挂装置设计与试验研究电动拖拉机电动悬挂装置设计与试验研究摘要:电动拖拉机的悬挂系统对于提高行驶平稳性、降低辗压对地面的冲击具有重要作用。本文以电动拖拉机为研究对象,设计了一种电动悬挂装置,并进行了试验研究。通过对电动拖拉机在不同地面条件下的行驶性能进行测试,验证了该装置的有效性和可行性。关键词:电动拖拉机;悬挂装置;行驶性能1.引言电动拖拉机是采用电力驱动的农业机械设备,具有节能环保、低噪音等优点,因此在农业生产中得到了广泛应用。然而,由于电动拖拉机的车身重量较大,行驶时容易产生颠簸和冲击
拖拉机电动悬挂自适应控制系统及控制方法.pdf
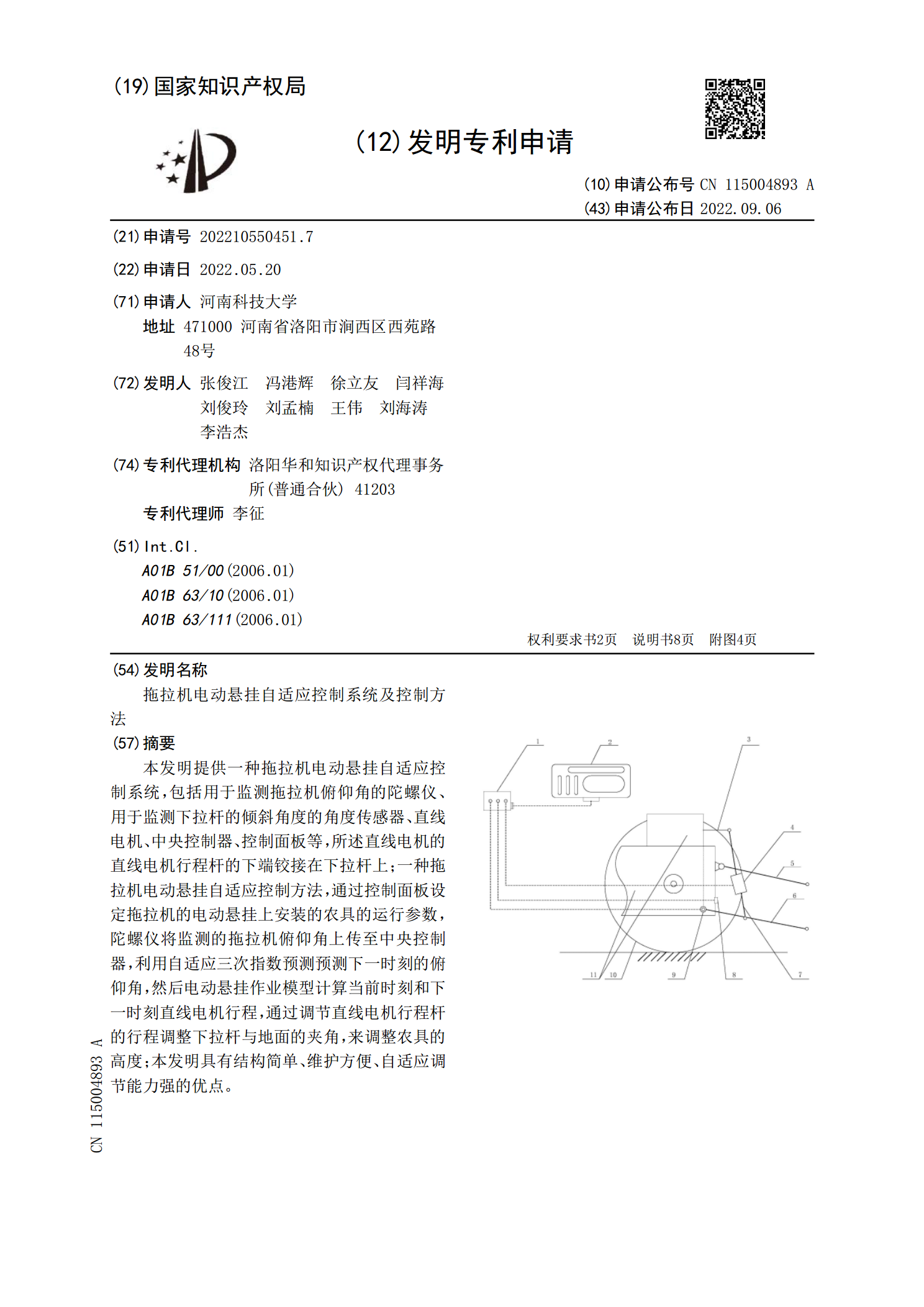
本发明提供一种拖拉机电动悬挂自适应控制系统,包括用于监测拖拉机俯仰角的陀螺仪、用于监测下拉杆的倾斜角度的角度传感器、直线电机、中央控制器、控制面板等,所述直线电机的直线电机行程杆的下端铰接在下拉杆上;一种拖拉机电动悬挂自适应控制方法,通过控制面板设定拖拉机的电动悬挂上安装的农具的运行参数,陀螺仪将监测的拖拉机俯仰角上传至中央控制器,利用自适应三次指数预测预测下一时刻的俯仰角,然后电动悬挂作业模型计算当前时刻和下一时刻直线电机行程,通过调节直线电机行程杆的行程调整下拉杆与地面的夹角,来调整农具的高度;本发明

电动拖拉机电动悬挂系统的设计与仿真性能分析论文.docx
电动拖拉机电动悬挂系统的设计与仿真性能分析论文目前,拖拉机大都采用液压悬挂系统。液压悬挂系统由液压泵、分配器、油缸、提升臂及悬挂杆件等组成。其中,液压泵、油缸、分配器结构较复杂,在工作过程中液压系统可能出现阀门卡死、安全阀失灵、泄漏等故障而使整个液压提升悬挂系统无法正常工作。液压悬挂系统的控制方式主要是机液控制方式,采用杆件和弹性元件,弹性元件的迟滞、机械摩擦和杆件的胀缩会影响调节性能。随着拖拉机向低油耗、轻排放、智能化、密封和舒适性方向发展,机液控制系统在结构布置和性能方面己不适应现代农业机械和精细农业