
汽车侧面盲区防撞预警系统的设计与实现综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

汽车侧面盲区防撞预警系统的设计与实现综述报告.docx
汽车侧面盲区防撞预警系统的设计与实现综述报告随着汽车的普及和交通量的不断增加,交通事故已成为影响人民安全的主要因素之一。其中,由于侧面盲区的存在而导致的交通事故居多。侧面盲区是指在驾驶员视野中盲区覆盖的车辆周围区域,特别是车辆侧面和后面的区域。因此,汽车侧面盲区防撞预警系统的开发和研究逐渐成为当前热点研究领域之一。一、研究现状汽车侧面盲区防撞预警系统主要包括四个技术方面:车身侧面盲区检测技术、障碍物预警技术、盲区碰撞预警技术和电控制动技术。其中,车身侧面盲区检测技术是该系统的核心,其它技术都是建立在该技术

汽车侧面盲区防撞预警系统的设计与实现任务书.docx
汽车侧面盲区防撞预警系统的设计与实现任务书任务书题目:汽车侧面盲区防撞预警系统的设计与实现任务背景:汽车在行驶中,在某些条件下会出现盲区,特别是在车辆侧面、后方,容易出现盲区问题。如果在这些位置上的车辆行驶不稳定,可能会引起交通事故。为了避免这些事故的发生,需要开发一种汽车盲区防撞预警系统,可以在车辆发生距离过近时做出预警提示,使驾驶员能够及时采取有效措施,避免事故发生。任务目标:本项目的目标是开发一种汽车盲区防撞预警系统,能够帮助驾驶员识别侧面盲区,以减少汽车事故的发生。任务内容:1.前期准备工作1.1

汽车侧向防撞预警系统的开发研究的综述报告.docx
汽车侧向防撞预警系统的开发研究的综述报告汽车侧向防撞预警系统是为了减少交通事故而开发出的一种预警系统。它能够通过车辆传感器和其他关键的技术来监测车辆的距离和位置,以此帮助驾驶员避免侧向撞击。这种系统是现代汽车安全技术的重要组成部分,对于保护车内乘客的生命安全具有重要意义。在汽车侧向防撞预警系统的开发方面,近年来取得了一些显著的进展。主要有以下几个方面的研究:1.传感器技术传感器技术是汽车侧向防撞系统中最重要的技术之一。它能够通过使用雷达、激光或摄像头等设备来检测周围环境中的障碍物。不同的传感器有着不同的特

毫米波汽车防撞雷达的设计与实现的综述报告.docx
毫米波汽车防撞雷达的设计与实现的综述报告毫米波汽车防撞雷达的设计与实现的综述随着汽车工业的发展和人们生活水平的提高,汽车和行人之间的安全问题逐渐受到关注。汽车防撞雷达(AutomaticCollisionAvoidanceSystem,ACAS)作为一种新兴的车辆安全技术,正在逐渐走进人们的生活。其中,毫米波汽车防撞雷达采用的是毫米波频段技术,在汽车和行人之间提供了高精度的测距、测速和方向感知功能,从而避免了汽车与行人之间的碰撞事件。毫米波汽车防撞雷达的设计与实现需要解决以下几个关键问题:毫米波信号的发射
车辆盲区防撞预警系统及方法.pdf
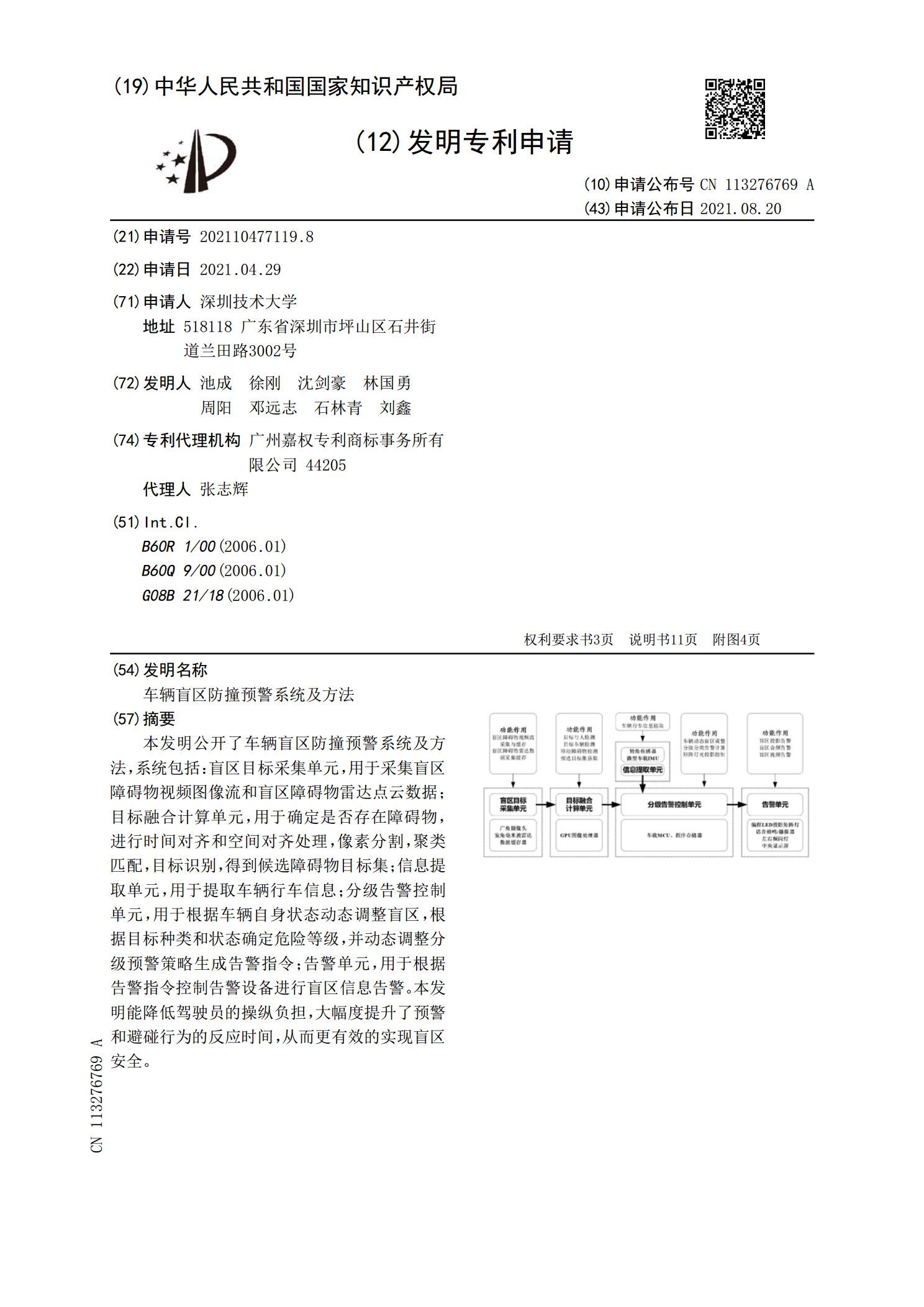
本发明公开了车辆盲区防撞预警系统及方法,系统包括:盲区目标采集单元,用于采集盲区障碍物视频图像流和盲区障碍物雷达点云数据;目标融合计算单元,用于确定是否存在障碍物,进行时间对齐和空间对齐处理,像素分割,聚类匹配,目标识别,得到候选障碍物目标集;信息提取单元,用于提取车辆行车信息;分级告警控制单元,用于根据车辆自身状态动态调整盲区,根据目标种类和状态确定危险等级,并动态调整分级预警策略生成告警指令;告警单元,用于根据告警指令控制告警设备进行盲区信息告警。本发明能降低驾驶员的操纵负担,大幅度提升了预警和避碰行