
小卫星编队飞行姿态协同控制研究综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
小卫星编队飞行姿态协同控制研究综述报告.pptx
汇报人:/目录0102研究背景与意义国内外研究现状研究内容与方法03小卫星编队飞行系统简介小卫星编队飞行姿态协同控制需求小卫星编队飞行姿态协同控制关键技术04姿态协同控制算法分类与比较基于模型预测控制算法的研究基于滑模控制算法的研究基于自适应控制算法的研究算法性能评估与优化05实验平台搭建与测试环境姿态协同控制算法实验验证实验结果分析与讨论实验结论与改进方向06小卫星编队飞行姿态协同控制在航天领域的应用前景小卫星编队飞行姿态协同控制在其他领域的应用前景小卫星编队飞行姿态协同控制技术发展趋势与展望07研究成

小卫星编队飞行姿态协同控制研究综述报告.docx
小卫星编队飞行姿态协同控制研究综述报告在近年来,随着卫星技术的快速发展与应用需求的增加,小卫星编队飞行姿态控制技术逐渐受到人们的关注。与传统卫星不同,小卫星可以更加灵活地完成多种任务,并且具有较低的成本和短的研发周期,因此受到越来越多的关注。小卫星编队通常由多颗小卫星组成,通过姿态控制实现空间相对位置的控制、维持以及相对运动的实现,这对小卫星的相对控制具有重要意义。在小卫星编队飞行姿态协同控制中,姿态协同意味着实现多颗小卫星之间的同步运动,以实现任务目标。姿态协同控制可以分为开环控制和闭环控制,其中闭环控

输入受限的航天器编队飞行姿态协同控制综述报告.docx
输入受限的航天器编队飞行姿态协同控制综述报告一、背景航天器编队技术是指在太空中让多架航天器协同飞行,以达到某些特定的任务目标。航天器编队技术已经逐渐成为航天技术领域中的研究热点,因为在一些特殊应用场景中,单一的大型航天器无法满足对任务的需求。例如,在天体探测任务中,多架航天器可以对目标天体进行多角度观测,更全面地获取数据,提高数据采集效率。此外,如果在太空中发生某些重大事故时,多架航天器可以结合起来形成一个救援编队,提高救援的效率和准确性。因此,航天器编队技术的发展意义重大,吸引了越来越多的研究者关注。二

卫星库仑力编队飞行及控制发展研究综述.docx
卫星库仑力编队飞行及控制发展研究综述卫星库仑力编队飞行及控制发展研究综述摘要:卫星库仑力编队飞行及控制是近年来卫星技术领域的研究热点之一。本文对卫星库仑力编队飞行及控制的发展进行了综述,并对未来研究方向进行了展望。1.引言卫星库仑力编队飞行及控制是指通过利用卫星之间的库仑力相互作用,实现协同飞行和控制的一种技术。相比传统的推进器推力控制,库仑力编队飞行及控制具有能耗低、响应速度快、控制精度高等优点,受到了广泛关注。2.卫星库仑力编队飞行原理卫星库仑力编队飞行的基本原理是通过卫星上部署的静电场发生器,产生电
编队卫星姿态协同控制仿真装置及其仿真验证方法.pdf
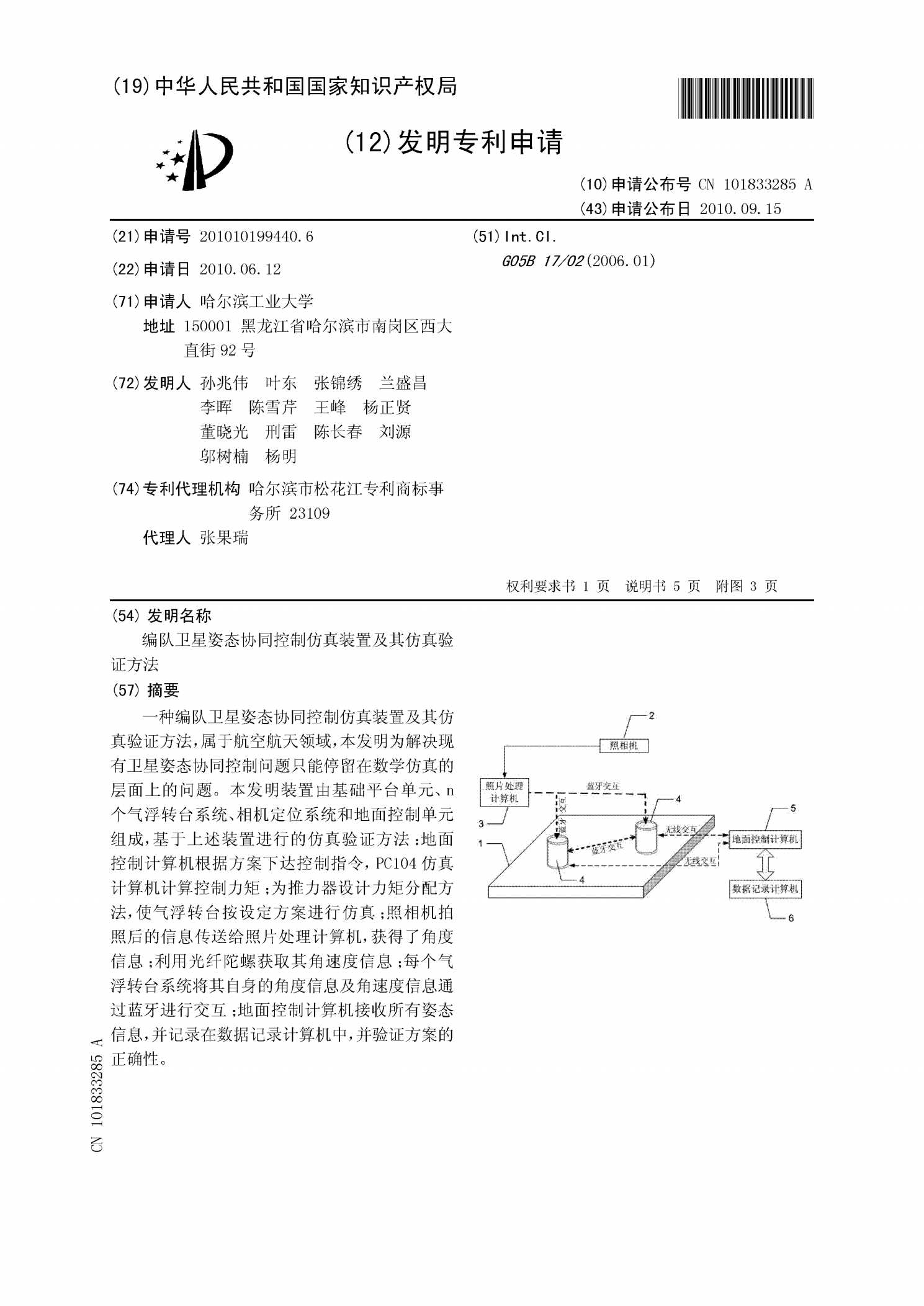
一种编队卫星姿态协同控制仿真装置及其仿真验证方法,属于航空航天领域,本发明为解决现有卫星姿态协同控制问题只能停留在数学仿真的层面上的问题。本发明装置由基础平台单元、n个气浮转台系统、相机定位系统和地面控制单元组成,基于上述装置进行的仿真验证方法:地面控制计算机根据方案下达控制指令,PC104仿真计算机计算控制力矩;为推力器设计力矩分配方法,使气浮转台按设定方案进行仿真;照相机拍照后的信息传送给照片处理计算机,获得了角度信息;利用光纤陀螺获取其角速度信息;每个气浮转台系统将其自身的角度信息及角速度信息通过蓝