
基于PMACClipper控制卡的交流伺服运动控制系统的实验研究综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于PMACClipper控制卡的交流伺服运动控制系统的实验研究综述报告.docx
基于PMACClipper控制卡的交流伺服运动控制系统的实验研究综述报告交流伺服运动控制系统是一种常用于工业自动化领域的运动控制技术,能够实现高精度、高效率的运动控制。PMACClipper控制卡作为一种常用的运动控制硬件,具有高速、高精度、高可靠性的特点,在交流伺服运动控制系统中被广泛应用。本文将对基于PMACClipper控制卡的交流伺服运动控制系统的实验研究进行综述。首先,本文将介绍PMACClipper控制卡的基本原理和特点。PMACClipper控制卡是一种高性能的运动控制硬件,它采用了先进的数

基于运动控制卡的高精度伺服系统研究的综述报告.docx
基于运动控制卡的高精度伺服系统研究的综述报告运动控制技术在现代工业中扮演着重要的角色,传统的伺服控制技术已经无法满足高性能、高精度和高速度的需求。因此,基于运动控制卡的高精度伺服系统研究具有重要的理论意义和应用前景。本文将对基于运动控制卡的高精度伺服系统研究的现状进行综述,并探讨今后的发展趋势。1.智能控制技术的发展随着技术的不断发展,智能控制技术在现代工业中扮演着越来越重要的角色。高精度伺服系统作为智能控制技术的重要组成部分,是实现高速度、高精度和高可靠性的基础。在智能控制技术的发展中,各类控制卡应用范
交流伺服电机与运动控制卡的接口实验.pdf
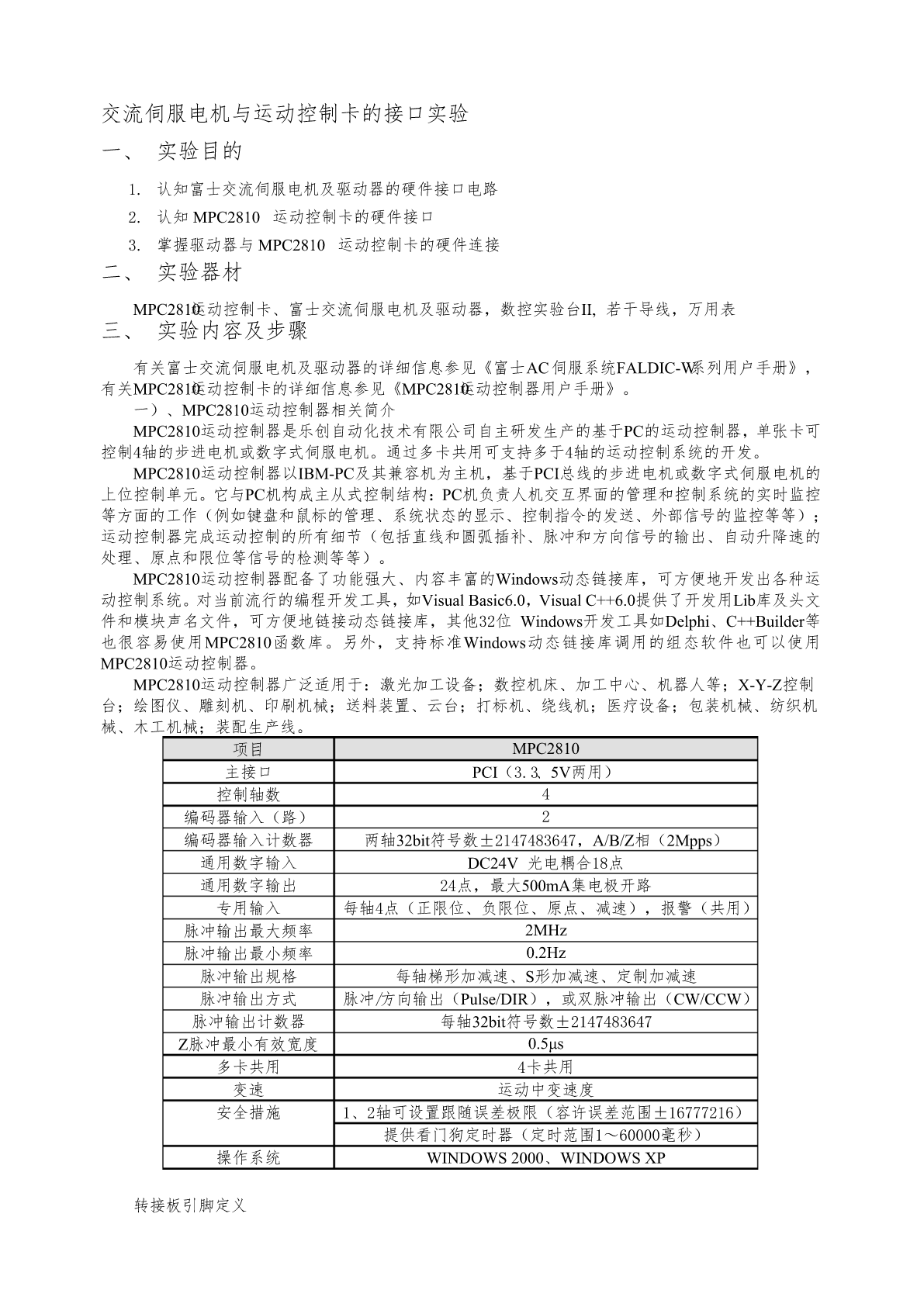
交流伺服电机与运动控制卡的接口实验一、实验目的1.认知富士交流伺服电机及驱动器的硬件接口电路2.认知MPC2810运动控制卡的硬件接口3.掌握驱动器与MPC2810运动控制卡的硬件连接二、实验器材MPC2810运动控制卡、富士交流伺服电机及驱动器,数控实验台II,若干导线,万用表三、实验内容及步骤有关富士交流伺服电机及驱动器的详细信息参见《富士AC伺服系统FALDIC-W系列用户手册》,有关MPC2810运动控制卡的详细信息参见《MPC2810运动控制器用户手册》。一)、MPC2810运动控制器相关简介M

基于多轴运动控制卡的张力控制系统的研究的综述报告.docx
基于多轴运动控制卡的张力控制系统的研究的综述报告近年来,随着工业技术不断发展,张力控制系统已成为了许多行业中至关重要的环节,其中多轴运动控制卡在其中发挥了至关重要的作用。本文将从多个方面综述基于多轴运动控制卡的张力控制系统的研究。一、多轴运动控制卡的基本特点多轴运动控制卡最基本的功能是控制电机、伺服器、步进器等驱动器运动的速度,并控制其位置。一般来说,多轴运动控制卡支持不同的控制模式,例如直线、圆弧、梯形和S-型等控制模式。同时,多轴运动控制卡还可以控制伺服器进行位置闭环控制,实现高精度控制。二、基于多轴

基于DSP的交流伺服运动控制系统开发与研究的中期报告.docx
基于DSP的交流伺服运动控制系统开发与研究的中期报告本项目致力于开发一种基于DSP的交流伺服运动控制系统,旨在提高工业生产过程中的运动控制精度、可靠性和速度。本中期报告将介绍我们目前已经完成的工作和下一步工作的计划。已完成的工作:1.系统设计和选型:根据项目需求,我们选择了一种基于TI公司的TMS320F2812DSP芯片和一种三相交流伺服电机。2.开发DSP模块:我们已经成功开发了一个DSP模块,实现了定时、计数、比较、捕获、PWM等基本功能。3.开发控制算法:我们已经开发了一种基于位置反馈的嵌套循环控