
光场相机的数据处理和标定方法研究综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

光场相机的数据处理和标定方法研究综述报告.docx
光场相机的数据处理和标定方法研究综述报告光场相机是一种采用微透镜阵列实现的图像传感器,能够同时采集物体的光场信息和光线方向信息。因此,光场相机具有广泛的应用前景,如计算机视觉、虚拟现实、自动驾驶等。然而,光场相机所采集的图像数据是高维数据,处理和标定需要特殊的算法和方法。本文对当前光场相机数据处理和标定的方法进行综述。一、光场图像数据处理光场图像数据的处理也被称为重构或反演过程,其主要任务是获取三维场景的深度信息和视角的变化等信息。1.视差法视差法是最简单的处理光场图片的方法之一。视差法通过计算不同微透镜

光场相机的数据处理和标定方法研究任务书.docx
光场相机的数据处理和标定方法研究任务书一、研究背景随着计算机技术和图像处理技术的日新月异,相机技术也在不断发展。光场相机是一种新型的图像采集设备,它具有高速、高精度、高灵活性等特点,正在被越来越广泛地应用于工业自动化、医学诊断、军事防卫等领域。光场相机能够记录每个像素对场景的方向和位置,拍摄的图像具有立体深度和聚焦后处理的能力,使得它可以在某些应用场景下代替传统相机,成为一种强有力的工具。然而,光场相机的数据处理和标定方法仍然存在不少问题。具体来说,一个光场相机需要进行以下几点数据处理和标定工作:1.光场

一种光场相机的盲标定方法.pdf
本发明公开了一种光场相机的盲标定方法,包括:在主透镜与传感器之间插入微透镜阵列以搭建初始的光场相机2.0结构,并分别测量主透镜和微透镜阵列分别与测量起始面的初始距离;固定传感器以及微透镜阵列的位置,向远离微透镜阵列的方向移动主透镜,并实时记录传感器采集的图像;测量依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离;根据主透镜和微透镜阵列分别与测量起始面的初始距离、以及依照光场相机1.0结构清晰成像时主透镜与测量起始面之间的距离,建立光场相机2.0结构的盲标定模型,计算得到微透镜阵列的结构参数,并

光场相机标定与主动式光场三维重建研究的开题报告.docx
光场相机标定与主动式光场三维重建研究的开题报告一、选题背景数字相机在近年来发展迅速,其成为现代工业生产和社会生活中不可或缺的一部分。光场相机因其特殊的采集方式,成为近年来的研究热点之一。光场相机在采集图像时,可以同时获得目标在不同视点下的多幅图像,从而为三维重建提供了更为丰富的信息。但是,光场相机的数据处理与标定却相对于传统相机更为复杂,这就对光场相机技术的应用提出了新的挑战。因此,本研究选取光场相机标定与主动式光场三维重建作为研究方向。该研究主要针对光场相机在数据采集过程中的标定问题以及三维重建技术的研
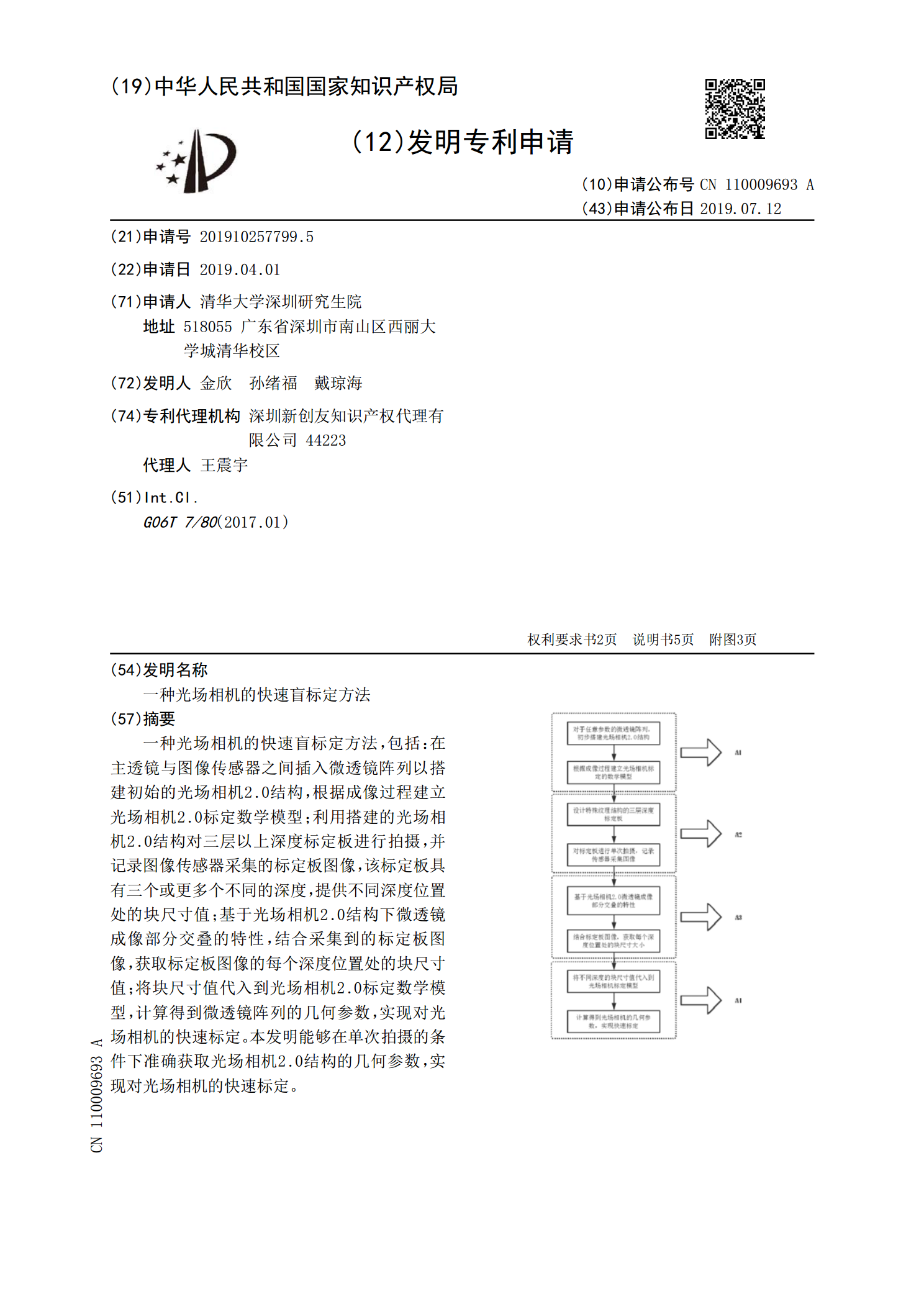
一种光场相机的快速盲标定方法.pdf
一种光场相机的快速盲标定方法,包括:在主透镜与图像传感器之间插入微透镜阵列以搭建初始的光场相机2.0结构,根据成像过程建立光场相机2.0标定数学模型;利用搭建的光场相机2.0结构对三层以上深度标定板进行拍摄,并记录图像传感器采集的标定板图像,该标定板具有三个或更多个不同的深度,提供不同深度位置处的块尺寸值;基于光场相机2.0结构下微透镜成像部分交叠的特性,结合采集到的标定板图像,获取标定板图像的每个深度位置处的块尺寸值;将块尺寸值代入到光场相机2.0标定数学模型,计算得到微透镜阵列的几何参数,实现对光场相