
船舶运动解耦滤波与控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船舶运动解耦滤波与控制方法.docx
船舶运动解耦滤波与控制方法船舶运动解耦滤波与控制方法摘要:船舶运动解耦滤波与控制方法是指通过对船舶系统运动状态的解耦滤波处理和控制策略的设计,实现对船舶水动力系统的稳定性和准确性的优化。本文首先介绍了船舶运动解耦滤波和控制的研究背景和意义,然后对船舶运动解耦滤波和控制方法进行了详细的分析和讨论,并对常见的船舶运动解耦滤波和控制方法进行了归纳总结。最后,本文对船舶运动解耦滤波与控制方法的未来发展进行了展望。关键词:船舶运动解耦、滤波、控制、稳定性、准确性一、引言随着船舶工业的发展,人们对船舶的性能和安全性要

基于卡尔曼滤波与解耦的视觉伺服控制.docx
基于卡尔曼滤波与解耦的视觉伺服控制基于卡尔曼滤波与解耦的视觉伺服控制摘要视觉伺服控制是机器人领域中重要的控制方法之一,可以使机器人在完成各种任务时实现精确的位置控制。然而,由于传感器数据的噪声和不确定性,视觉伺服控制面临着一系列挑战。本文提出了一种基于卡尔曼滤波与解耦的视觉伺服控制方法,通过利用卡尔曼滤波对传感器数据进行滤波,并采用解耦技术将位置估计与控制分离,提高了视觉伺服控制系统的鲁棒性和精度。1.引言视觉伺服控制是基于视觉反馈的控制方法,可以使机器人在感知和控制的过程中准确地估计其位置和姿态信息。然
针对绳索运动耦合的被动解耦机构及其解耦方法.pdf
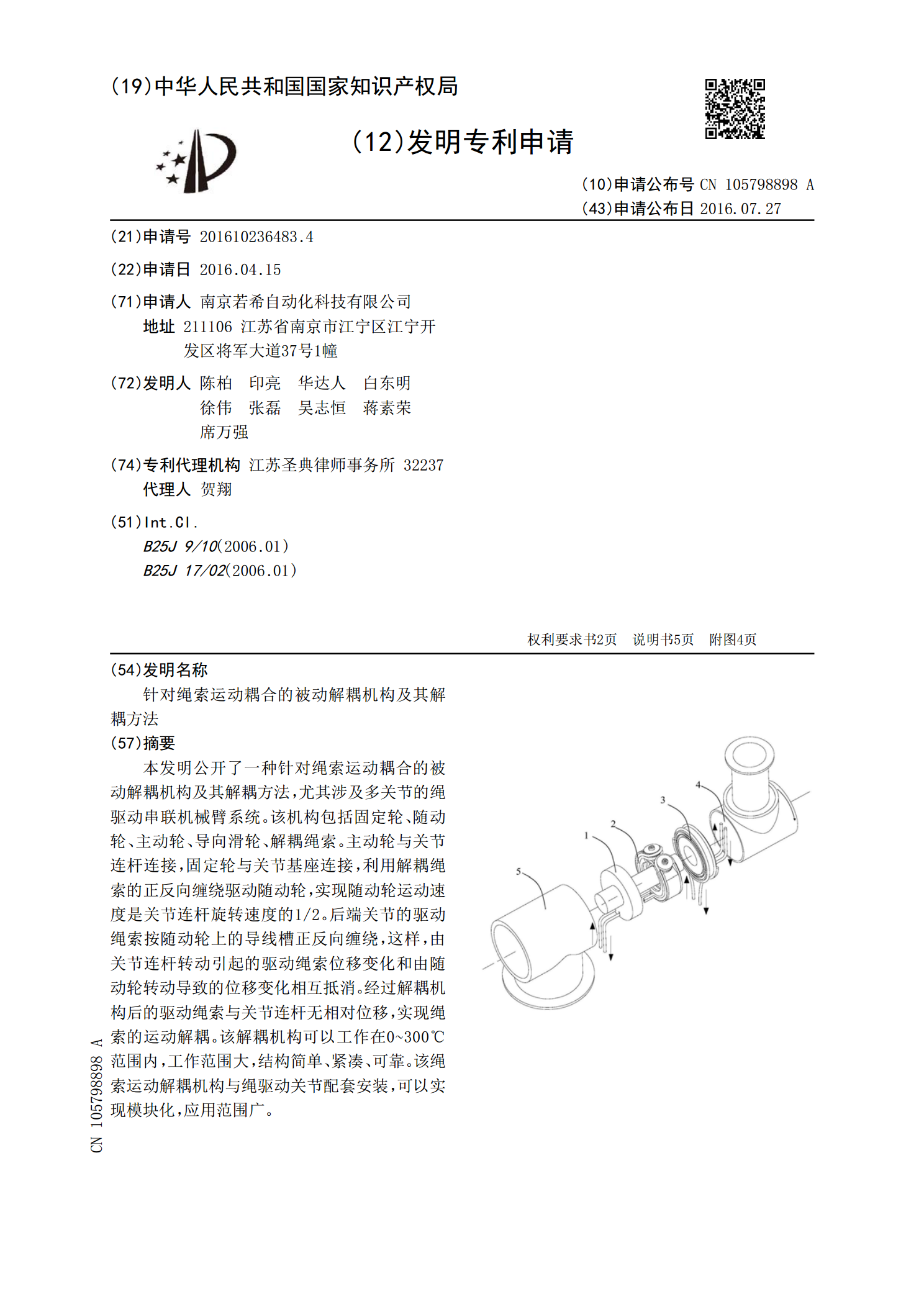
本发明公开了一种针对绳索运动耦合的被动解耦机构及其解耦方法,尤其涉及多关节的绳驱动串联机械臂系统。该机构包括固定轮、随动轮、主动轮、导向滑轮、解耦绳索。主动轮与关节连杆连接,固定轮与关节基座连接,利用解耦绳索的正反向缠绕驱动随动轮,实现随动轮运动速度是关节连杆旋转速度的1/2。后端关节的驱动绳索按随动轮上的导线槽正反向缠绕,这样,由关节连杆转动引起的驱动绳索位移变化和由随动轮转动导致的位移变化相互抵消。经过解耦机构后的驱动绳索与关节连杆无相对位移,实现绳索的运动解耦。该解耦机构可以工作在0~300℃范围内

解耦的转换测量Kalman滤波算法.pdf
第6期电子学报Vol.31No.62003年6月ACTAELECTRONICASINICAJune2003解耦的转换测量Kalman滤波算法王宏强,黎湘,庄钊文,郭桂蓉(国防科技大学电子科学与工程学院,ATR国家重点实验室,湖南长沙410073)摘要:对于极坐标观测下的目标跟踪问题,基于转换测量Kalman滤波器(CMKF),应用正规变换,得到了解耦的CMKF算法,同时研究了CMKF和解耦CMKF算法的初值估计问题.仿真结果表明了解耦CMKF算法及其初值估计的有效性.关键词:解耦滤波器;转换测量Kalma

风机解耦控制方法及装置.pdf
本发明公开了一种风机解耦控制方法及装置,该方法包括:对风烟系统进行建模得到风烟系统的第一特性和第二特性,其中风烟系统不具有旁路烟道,第一特性是风烟系统中的引风机、送风机和增压风机对炉膛负压的特性,第二特性是引风机、送风机和增压风机对增压风机入口压力的特性;基于第一特性和第二特性设计前馈控制器;利用第一特性、第二特性和前馈控制器进行风烟系统仿真,根据仿真结果调整前馈控制器参数;在将前馈控制器和调整后的参数进行DCS逻辑组态并下装到电厂DCS系统,且DCS系统稳定后,进行实际定值扰动试验和变负荷试验,根据试验