
基于融合感知的场景数据提取技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于融合感知的场景数据提取技术研究.docx
基于融合感知的场景数据提取技术研究基于融合感知的场景数据提取技术研究摘要:随着智能交通系统和自动驾驶技术的发展,场景数据的提取已成为一个重要的研究方向。为了获取更全面、准确和可靠的场景数据,请了解和理解周围环境的状态对于实现智能交通系统的高效运行至关重要。本文提出了一种基于融合感知的场景数据提取技术,通过综合不同传感器的数据来实现对场景信息的全面感知和准确提取。该技术可以有效地提高场景数据的提取精度和可靠性,并为智能交通系统的部署和优化提供有力支持。关键词:场景数据提取;融合感知;智能交通系统;自动驾驶1

基于数据融合的航空γ能谱特征峰信息提取技术研究.docx
基于数据融合的航空γ能谱特征峰信息提取技术研究随着现代航空技术的不断发展,航空γ能谱技术在航空领域的应用也越来越广泛。航空γ能谱技术可以用于检测航空器外部结构的缺陷和损伤,进一步保障航空器在飞行中的安全。然而,由于复杂的环境和多种因素的影响,航空γ能谱信号通常带有很强的噪声,且信号特征峰复杂多样,如何提取有效的特征峰信息,一直是一个亟待解决的问题。本文针对上述问题,提出了一种基于数据融合的航空γ能谱特征峰信息提取技术。通过将多个传感器的数据进行融合,利用信号处理和数据分析的方法提取能量特征峰,实现对航空器
基于多维感知融合的轨迹数据采集系统.pdf
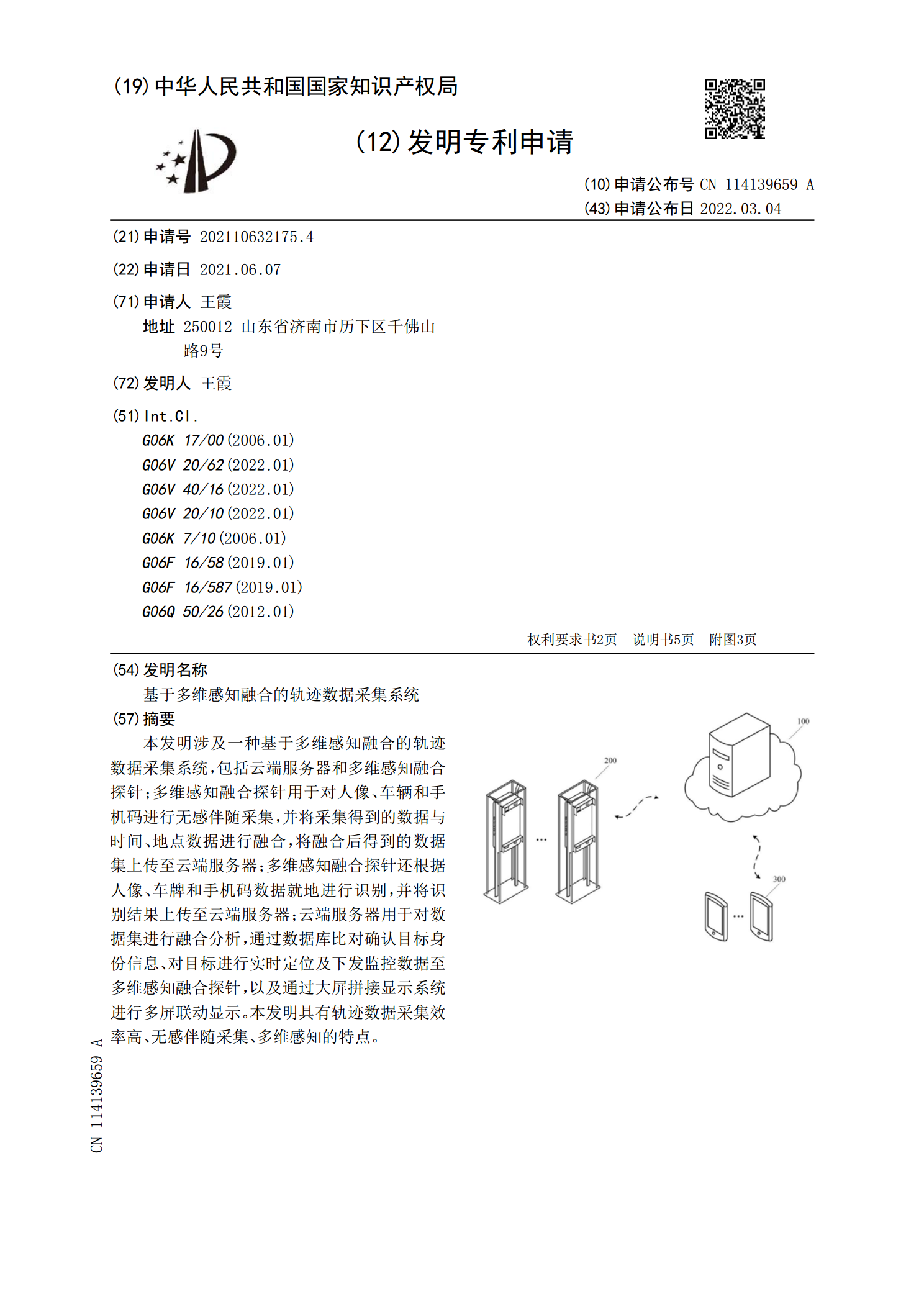
本发明涉及一种基于多维感知融合的轨迹数据采集系统,包括云端服务器和多维感知融合探针;多维感知融合探针用于对人像、车辆和手机码进行无感伴随采集,并将采集得到的数据与时间、地点数据进行融合,将融合后得到的数据集上传至云端服务器;多维感知融合探针还根据人像、车牌和手机码数据就地进行识别,并将识别结果上传至云端服务器;云端服务器用于对数据集进行融合分析,通过数据库比对确认目标身份信息、对目标进行实时定位及下发监控数据至多维感知融合探针,以及通过大屏拼接显示系统进行多屏联动显示。本发明具有轨迹数据采集效率高、无感伴

基于压缩感知的自适应数据融合算法.docx
基于压缩感知的自适应数据融合算法概述随着信息技术的迅猛发展,数据处理和信息传输的需求也不断增加。数据融合是一种有效的数据处理方式,它将从不同来源采集的数据进行整合,以提供更全面、准确和可靠的信息。随着数据量的不断增加和传输线路的复杂性,传统的数据融合方法往往会遇到压缩、失真和带宽限制等问题。因此,基于压缩感知的自适应数据融合算法成为了研究的热点。压缩感知是近年来发展起来的一种新型信号处理技术。它利用信号的稀疏性,通过少量的非线性测量,就可以高效地恢复信号。压缩感知技术不仅可以提高数据处理的速度,还可以通过

基于指标提取的网络安全态势感知技术研究.docx
基于指标提取的网络安全态势感知技术研究摘要:网络安全是当下互联网时代面临的重大问题之一,网络安全态势感知技术是提高网络安全防御能力的重要手段。本文针对网络安全态势感知技术的研究,探讨了基于指标提取的网络安全态势感知技术的实现方法和运用场景等相关内容,同时剖析了该技术的优缺点,并提出了可行的发展方向。关键词:网络安全;态势感知;技术研究;指标提取;发展方向一、引言随着互联网信息快速发展,网络安全面临了前所未有的挑战。早期的网络安全技术主要着力于入侵检测和防御等方面,然而这种方式仅能满足网络安全的局部需求,不