
基于位置式PID温控系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于位置式PID温控系统设计.docx
基于位置式PID温控系统设计基于位置式PID温控系统设计摘要:随着科技的不断进步,温控系统在各个领域中的应用越来越广泛。PID控制是一种常用的温控方法,结合位置式的控制算法,能够有效地实现温度的稳定控制。本论文针对位置式PID温控系统进行设计和研究,详细介绍了系统的结构、工作原理以及参数的调整方法。通过对实验结果的分析和对比,验证了该系统的温控性能优越,具有较好的稳定性和响应速度。关键词:位置式PID,温控系统,控制算法,稳定性,响应速度1.引言温控系统在现代工业生产和日常生活中起着非常重要的作用。对于许
基于Matlab的PID温控系统的设计与仿真.pdf
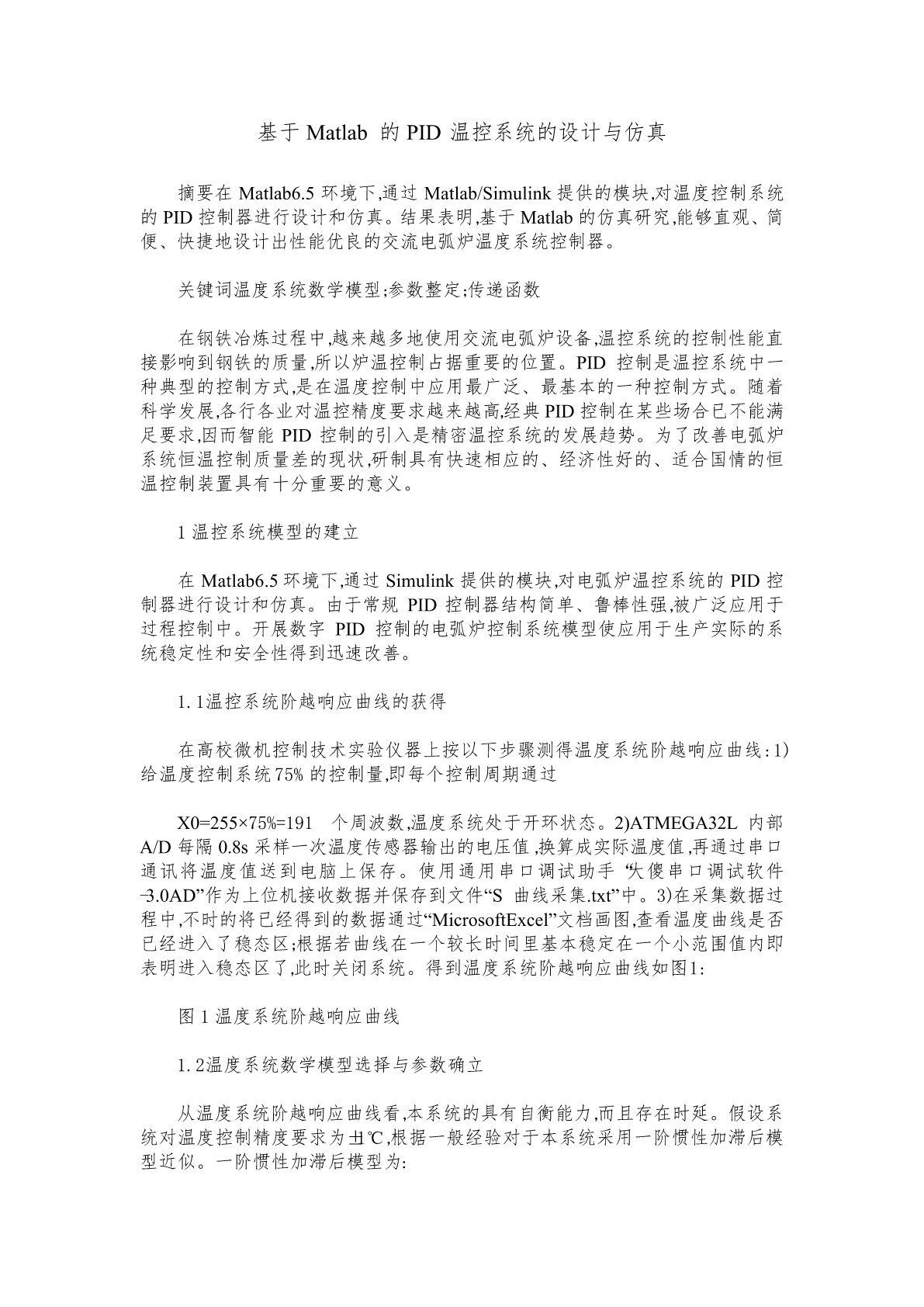
基于Matlab的PID温控系统的设计与仿真摘要在Matlab6.5环境下,通过Matlab/Simulink提供的模块,对温度控制系统的PID控制器进行设计和仿真。结果表明,基于Matlab的仿真研究,能够直观、简便、快捷地设计出性能优良的交流电弧炉温度系统控制器。关键词温度系统数学模型;参数整定;传递函数在钢铁冶炼过程中,越来越多地使用交流电弧炉设备,温控系统的控制性能直接影响到钢铁的质量,所以炉温控制占据重要的位置。PID控制是温控系统中一种典型的控制方式,是在温度控制中应用最广泛、最基本的一种控制
基于PID算法的智能温控系统设计.ppt
基于PID算法的智能温控系统设计目录研究背景系统应用实例设计的展开思路和框架论文结构相关概念研究综述研究的方法与过程研究的方法与过程研究的方法与过程研究的过程与方法设计存在的问题及对策致谢END
基于PID的简单水温控制系统设计.pdf

基于PID的简单水温控制系统设计.doc
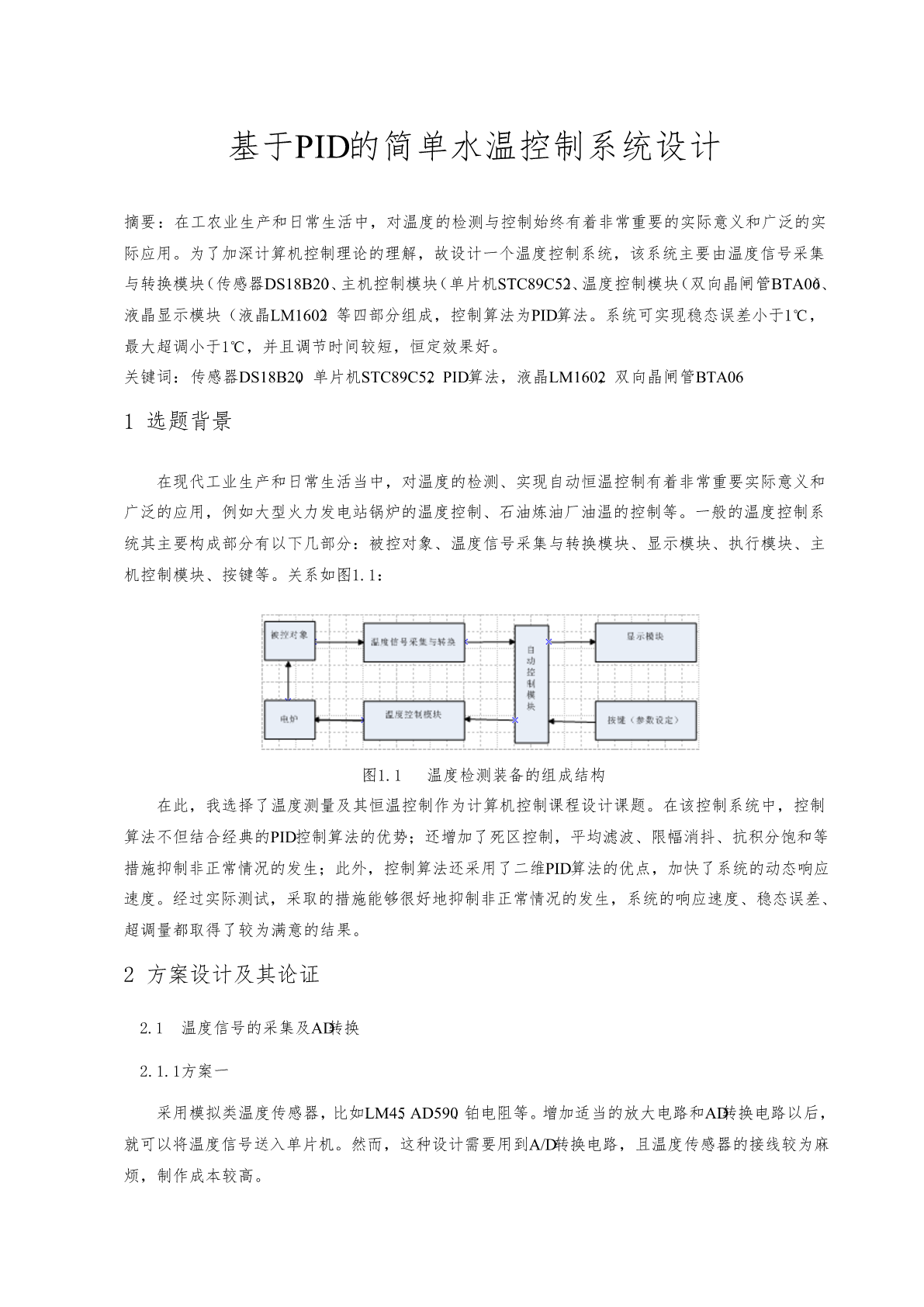
基于PID的简单水温控制系统设计摘要:在工农业生产和日常生活中,对温度的检测与控制始终有着非常重要的实际意义和广泛的实际应用。为了加深计算机控制理论的理解,故设计一个温度控制系统,该系统主要由温度信号采集与转换模块(传感器DS18B20)、主机控制模块(单片机STC89C52)、温度控制模块(双向晶闸管BTA06)、液晶显示模块(液晶LM1602)等四部分组成,控制算法为PID算法。系统可实现稳态误差小于1℃,最大超调小于1℃,并且调节时间较短,恒定效果好。关键词:传感器DS18B20,单片机STC89C