
基于多传感器融合的位姿检测系统发展现状.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多传感器融合的位姿检测系统发展现状.docx
基于多传感器融合的位姿检测系统发展现状基于多传感器融合的位姿检测系统发展现状摘要:随着社会的进步和科学技术的不断发展,位姿检测技术在现代工业制造和自动化领域中扮演着重要的角色。传统的位姿检测系统往往受到单一传感器的限制,无法精确获取目标物体的位置和姿态信息。为了克服这个问题,基于多传感器融合的位姿检测系统应运而生。本文将就基于多传感器融合的位姿检测系统的发展现状进行详细地综述和分析。关键词:位姿检测,多传感器融合,定位,姿态估计,发展现状1.引言位姿检测是指对目标物体在三维空间中的位置和姿态进行准确测量和

基于多传感器的人手位姿检测系统.docx
基于多传感器的人手位姿检测系统摘要本文提出了一种基于多传感器的人手位姿检测系统,该系统可以在线检测和跟踪人手的三维位置和方向,适用于虚拟现实、增强现实等应用场景。该系统通过使用多个传感器,包括深度相机、惯性测量单元和电容传感器,集成并优化其测量数据,实现高精度的手部位姿检测。实验结果表明,本文提出的系统可以在不同光照、背景和手部形状条件下获得较好的检测效果,且具有较快的检测速度和较低的跟踪误差。关键词:人手位姿检测,多传感器,深度相机,惯性测量单元,电容传感器。引言现在,虚拟现实、增强现实等技术越来越广泛
一种多传感器融合位姿估计方法.pdf
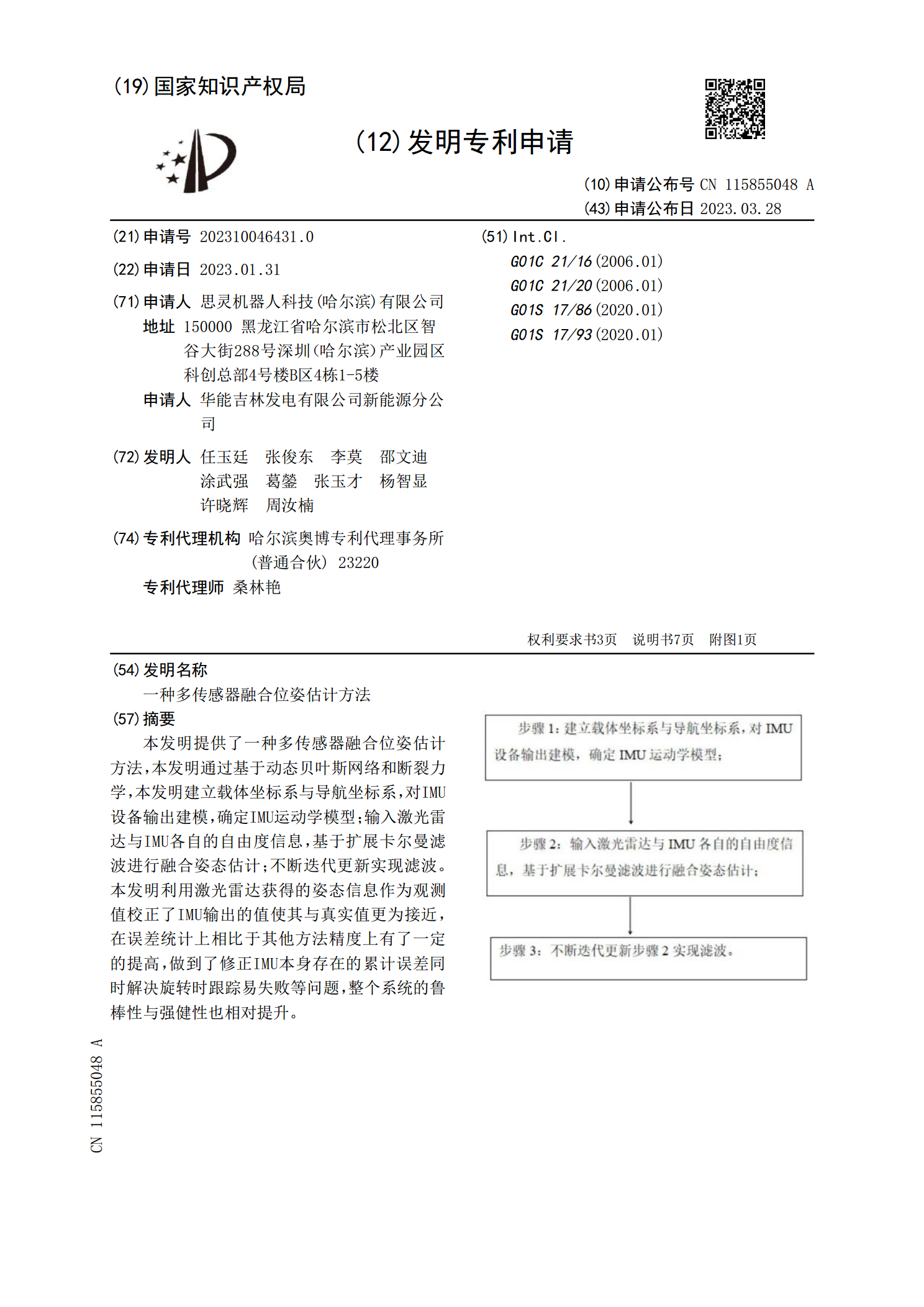
本发明提供了一种多传感器融合位姿估计方法,本发明通过基于动态贝叶斯网络和断裂力学,本发明建立载体坐标系与导航坐标系,对IMU设备输出建模,确定IMU运动学模型;输入激光雷达与IMU各自的自由度信息,基于扩展卡尔曼滤波进行融合姿态估计;不断迭代更新实现滤波。本发明利用激光雷达获得的姿态信息作为观测值校正了IMU输出的值使其与真实值更为接近,在误差统计上相比于其他方法精度上有了一定的提高,做到了修正IMU本身存在的累计误差同时解决旋转时跟踪易失败等问题,整个系统的鲁棒性与强健性也相对提升。

微惯导系统复合标定与多传感器数据融合位姿测量方法研究.docx
微惯导系统复合标定与多传感器数据融合位姿测量方法研究微惯导系统复合标定与多传感器数据融合位姿测量方法研究摘要:随着科技的不断进步,无人系统在各个领域的应用越来越广泛。然而,无人系统在复杂环境中进行位姿测量时常常受到多种因素的干扰,导致测量结果的不准确性。本文将研究微惯导系统复合标定与多传感器数据融合位姿测量方法,以提高位姿测量的准确性和可靠性。关键词:微惯导系统,复合标定,多传感器数据融合,位姿测量1.引言位姿测量是无人系统中非常重要的一个任务,它不仅可以用于导航和控制,还可以应用于地图构建和目标跟踪等领

基于ARM的航姿参考系统多传感器信息融合技术研究.docx
基于ARM的航姿参考系统多传感器信息融合技术研究基于ARM的航姿参考系统多传感器信息融合技术研究摘要:随着航空航天技术的飞速发展,航姿参考系统在飞行控制和导航中起着至关重要的作用。本文以基于ARM的航姿参考系统为研究对象,探讨了多传感器信息融合技术在航姿参考系统中的应用。首先,介绍了传感器信息融合技术的基本原理和方法。然后,详细分析了基于ARM处理器的航姿参考系统的硬件设计和软件实现。最后,通过实验验证了所设计的航姿参考系统在多传感器信息融合下的性能和可靠性。关键词:航姿参考系统;多传感器信息融合;ARM