
基于双目立体视觉偏折术的标定.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目立体视觉偏折术的标定.docx
基于双目立体视觉偏折术的标定摘要本文介绍了基于双目立体视觉偏折术的标定方法。双目视觉是通过两只眼睛看到物体的场景,获得立体感的一种机制。由于眼睛间距的差异,两只眼睛看到的场景稍有不同,产生了偏差,从而产生了立体效果。这种立体效果可以用来计算场景中物体的深度信息,因此在电脑视觉、机器人视觉、虚拟现实等领域都有广泛应用。在本文中,我们采用的是双目立体视觉偏折术的方法来进行标定。该方法利用两个摄像头来捕捉两只眼睛的视觉信息,并通过计算机算法来精准测量眼睛间距和角度,从而得到偏差值。根据这些偏差值,我们可以准确地

基于双目立体视觉的目标定位.docx
基于双目立体视觉的目标定位基于双目立体视觉的目标定位摘要:随着计算机视觉的发展,双目立体视觉逐渐成为一种常用的目标定位技术。该技术利用两个摄像头或传感器,通过测量两个视点之间的距离和角度差,实现对目标物体的三维空间定位。本文将介绍双目立体视觉的原理和应用领域,并重点研究了目标物体在不同距离情况下的定位精度和可靠性。通过实验证明,双目立体视觉在目标定位方面具有较高的准确性和稳定性,具备广泛的应用前景。关键词:双目立体视觉;目标定位;三维空间;定位精度;应用领域1.引言目标定位是计算机视觉领域中的一个重要研究

基于双目立体视觉的标定技术及应用.docx
基于双目立体视觉的标定技术及应用基于双目立体视觉的标定技术及应用摘要:双目立体视觉是计算机视觉领域的重要研究方向,广泛应用于跟踪、测量、目标检测等领域。本文介绍了双目立体视觉的标定技术及其应用,主要包括双目摄像机的标定方法、立体匹配算法和双目立体视觉的应用领域。通过对双目立体视觉的研究和应用,可以为机器人导航、视觉测量等问题提供有效的解决方案。关键词:双目立体视觉、标定技术、立体匹配、应用领域1.引言双目立体视觉是一种通过两个摄像机模拟人眼的立体视觉系统,可以获取场景的三维信息。在计算机视觉领域,双目立体

一种基于双目立体视觉的立体标定方法.docx
一种基于双目立体视觉的立体标定方法基于双目立体视觉的立体标定方法摘要:双目立体视觉系统是一种通过采集左右两个相机的图像来实现三维重构和深度测量的技术。立体标定是双目立体视觉系统中的一个关键步骤,其目的是确定两个相机之间的空间几何关系,以便实现准确的深度测量和三维重构。本文介绍了一种基于双目立体视觉的立体标定方法,包括相机标定和立体匹配算法。实验结果表明,该方法能够实现高精度的立体重建和深度测量。关键词:双目立体视觉、立体标定、相机标定、立体匹配1.引言双目立体视觉是一种通过采集左右两个相机图像来实现三维重
一种基于相位偏折术的标定系统.pdf
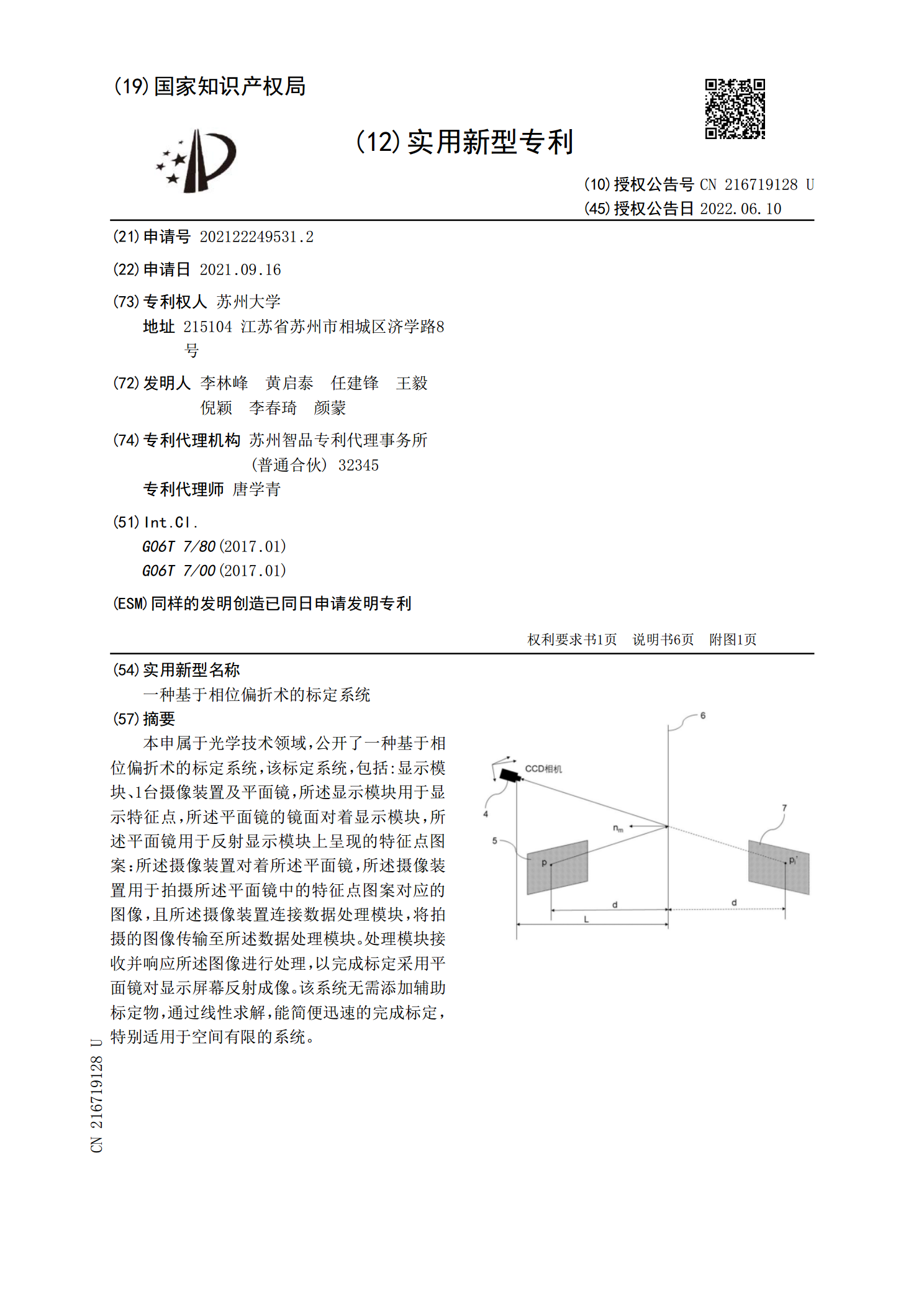
本申属于光学技术领域,公开了一种基于相位偏折术的标定系统,该标定系统,包括:显示模块、1台摄像装置及平面镜,所述显示模块用于显示特征点,所述平面镜的镜面对着显示模块,所述平面镜用于反射显示模块上呈现的特征点图案:所述摄像装置对着所述平面镜,所述摄像装置用于拍摄所述平面镜中的特征点图案对应的图像,且所述摄像装置连接数据处理模块,将拍摄的图像传输至所述数据处理模块。处理模块接收并响应所述图像进行处理,以完成标定采用平面镜对显示屏幕反射成像。该系统无需添加辅助标定物,通过线性求解,能简便迅速的完成标定,特别适用