
临近空间驻留飞艇模糊变结构姿态控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

临近空间驻留飞艇模糊变结构姿态控制方法.docx
临近空间驻留飞艇模糊变结构姿态控制方法标题:临近空间驻留飞艇模糊变结构姿态控制方法摘要:近年来,临近空间驻留飞艇技术在航天领域中得到越来越广泛的应用。然而,该技术中的姿态控制问题仍然是一个具有挑战性的领域。本论文提出了一种基于模糊变结构的姿态控制方法,用于解决临近空间驻留飞艇的姿态控制问题。该方法将模糊控制与变结构控制相结合,通过模糊控制器来提供基本控制指令,再通过变结构控制器进行精细调整,以实现飞艇的精确姿态控制。实验结果表明,该方法能够有效地提升飞艇的姿态控制精度和稳定性,为临近空间驻留飞艇技术的发展

临近空间软式飞艇结构特性分析的开题报告.docx
临近空间软式飞艇结构特性分析的开题报告一、选题背景临近空间是指地球轨道高度低于36000公里的范围,这个范围内的空间用于卫星、人造天体、空间站等航天器的运行和在轨维修。软式飞艇,指飞艇结构中的气室壁面为柔性材料,具有良好的适应性和可展性。软式飞艇适用于临近空间环境的探测和科学研究,具有运载能力大、依靠太阳光驱动、搭载载荷功能等优点。因此,本文选取对软式飞艇在临近空间的结构特性进行分析。二、研究意义软式飞艇的应用在临近空间的作用日益重要,且软式飞艇在临近空间的受力与响应机理与地面应用场景有所不同,因此了解软
一种自主飞艇定点驻留控制方法.pdf
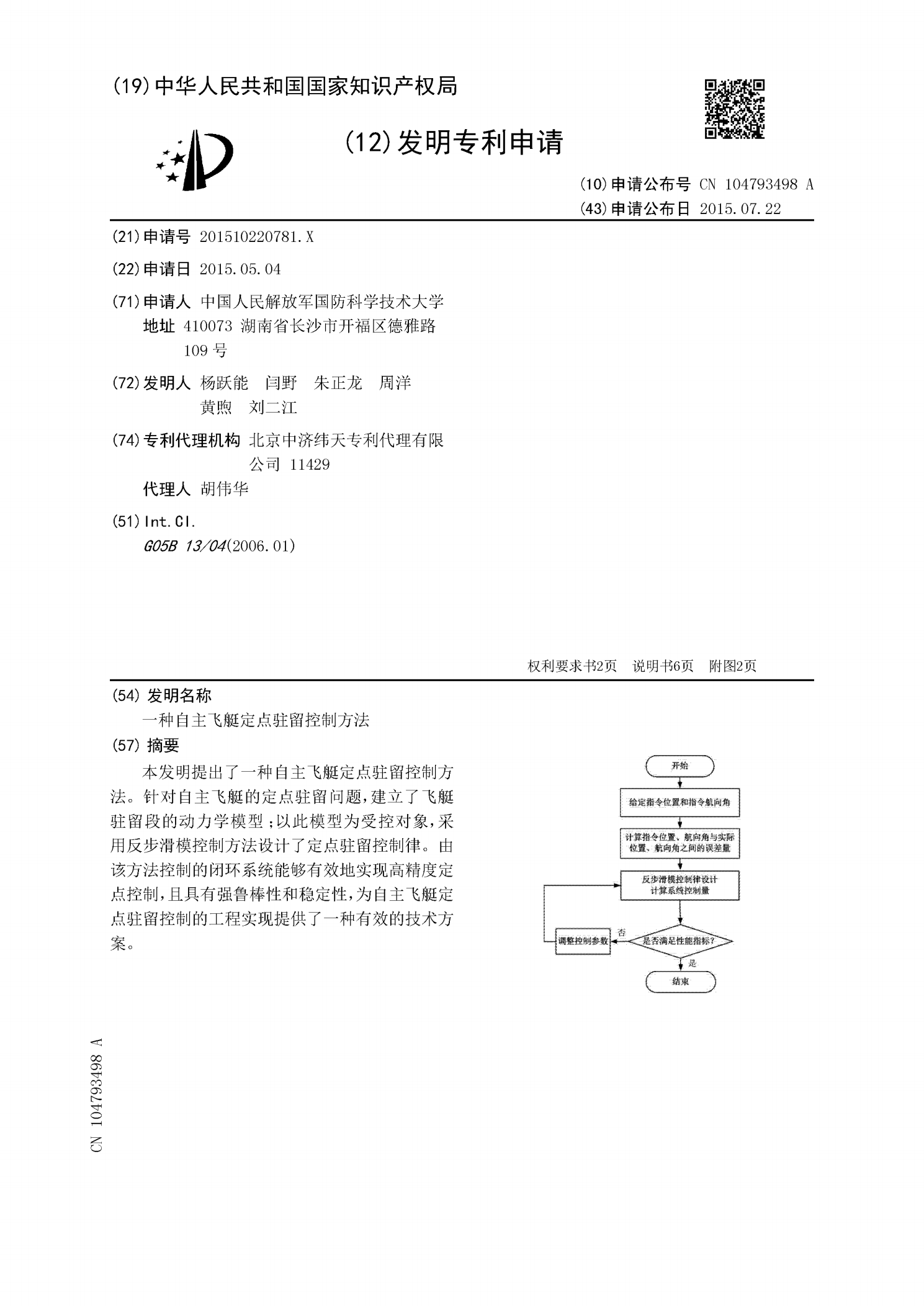
本发明提出了一种自主飞艇定点驻留控制方法。针对自主飞艇的定点驻留问题,建立了飞艇驻留段的动力学模型;以此模型为受控对象,采用反步滑模控制方法设计了定点驻留控制律。由该方法控制的闭环系统能够有效地实现高精度定点控制,且具有强鲁棒性和稳定性,为自主飞艇定点驻留控制的工程实现提供了一种有效的技术方案。

临近空间飞艇新型超压加筋结构布局优化设计.docx
临近空间飞艇新型超压加筋结构布局优化设计随着科技的不断进步,空间飞艇已经成为了未来空间运输的一种主要形式。在空间飞艇的设计中,超压加筋结构的布局优化,是保证空间飞艇安全稳定飞行的关键。超压加筋结构是指,在结构中采用了加强筋的方式,使其承受空气动力加载时能够保持足够的强度和刚度。在空间飞艇的设计中,结构的轻量化和强化就显得尤为重要,因为这不仅决定了其航行的速度和载荷,而且也直接关系到航空器的安全。由于超压加筋结构的优异性能,研究人员对其进行了大量探索和研究。其中,最为关键的一步就是优化结构布局。布局优化是指

基于变结构控制的模糊逻辑控制.docx
基于变结构控制的模糊逻辑控制基于变结构控制的模糊逻辑控制摘要:近年来,随着自动化技术的不断发展,控制系统的研究也得到了广泛关注。在控制系统中,变结构控制和模糊逻辑控制是两种常见的控制技术。本论文将介绍基于变结构控制的模糊逻辑控制方法,并讨论其在实际应用中的优点和局限性。关键词:变结构控制,模糊逻辑控制,模糊控制器,自适应控制一、引言随着科学技术的进步和社会的不断发展,控制系统在各个领域的应用越来越广泛。控制系统是指通过传感器对被控对象进行监测,再根据预定的控制策略对其进行调节和控制的一种自动化系统。控制系