
主被动结合搬运助力外骨骼设计及控制策略研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主被动结合搬运助力外骨骼设计及控制策略研究.docx
主被动结合搬运助力外骨骼设计及控制策略研究主被动结合搬运助力外骨骼设计及控制策略研究摘要:外骨骼技术在助力搬运领域有着广阔的应用前景。本论文针对外骨骼技术的研究,提出了主被动结合搬运助力外骨骼设计及控制策略。首先介绍了搬运助力外骨骼的原理和应用场景。然后分析了目前外骨骼技术存在的问题,并提出了主被动结合的思路来解决这些问题。接着,详细描述了主被动结合的搬运助力外骨骼的设计方案,包括机械结构设计和传感器网络设计。最后,介绍了基于主被动结合的搬运助力外骨骼的控制策略,包括位姿控制和力矩控制。通过对这些控制策略
主被动结合的腰部助力外骨骼.pdf
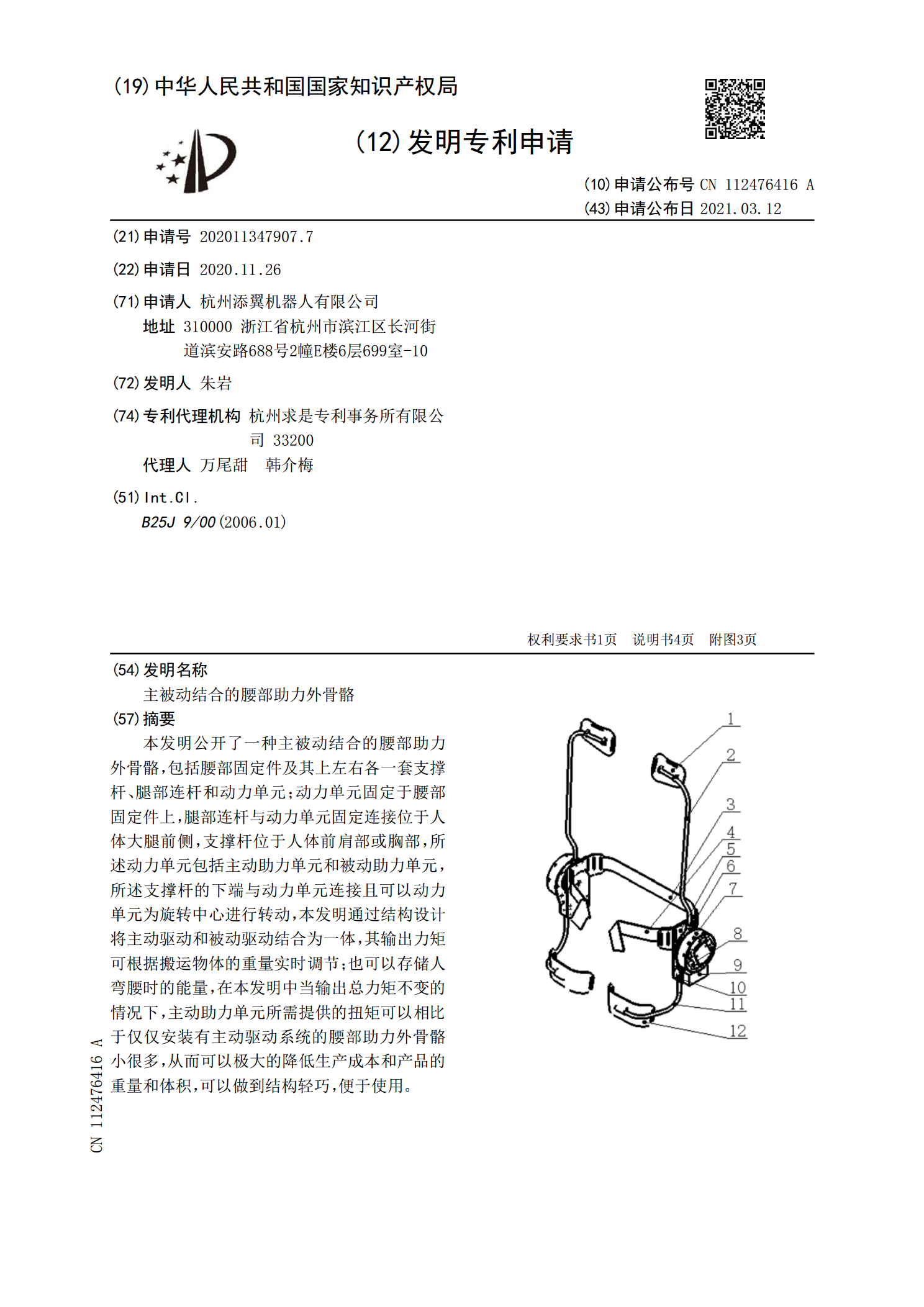
本发明公开了一种主被动结合的腰部助力外骨骼,包括腰部固定件及其上左右各一套支撑杆、腿部连杆和动力单元;动力单元固定于腰部固定件上,腿部连杆与动力单元固定连接位于人体大腿前侧,支撑杆位于人体前肩部或胸部,所述动力单元包括主动助力单元和被动助力单元,所述支撑杆的下端与动力单元连接且可以动力单元为旋转中心进行转动,本发明通过结构设计将主动驱动和被动驱动结合为一体,其输出力矩可根据搬运物体的重量实时调节;也可以存储人弯腰时的能量,在本发明中当输出总力矩不变的情况下,主动助力单元所需提供的扭矩可以相比于仅仅安装有主
一种主被动结合的下肢助力外骨骼机器人.pdf
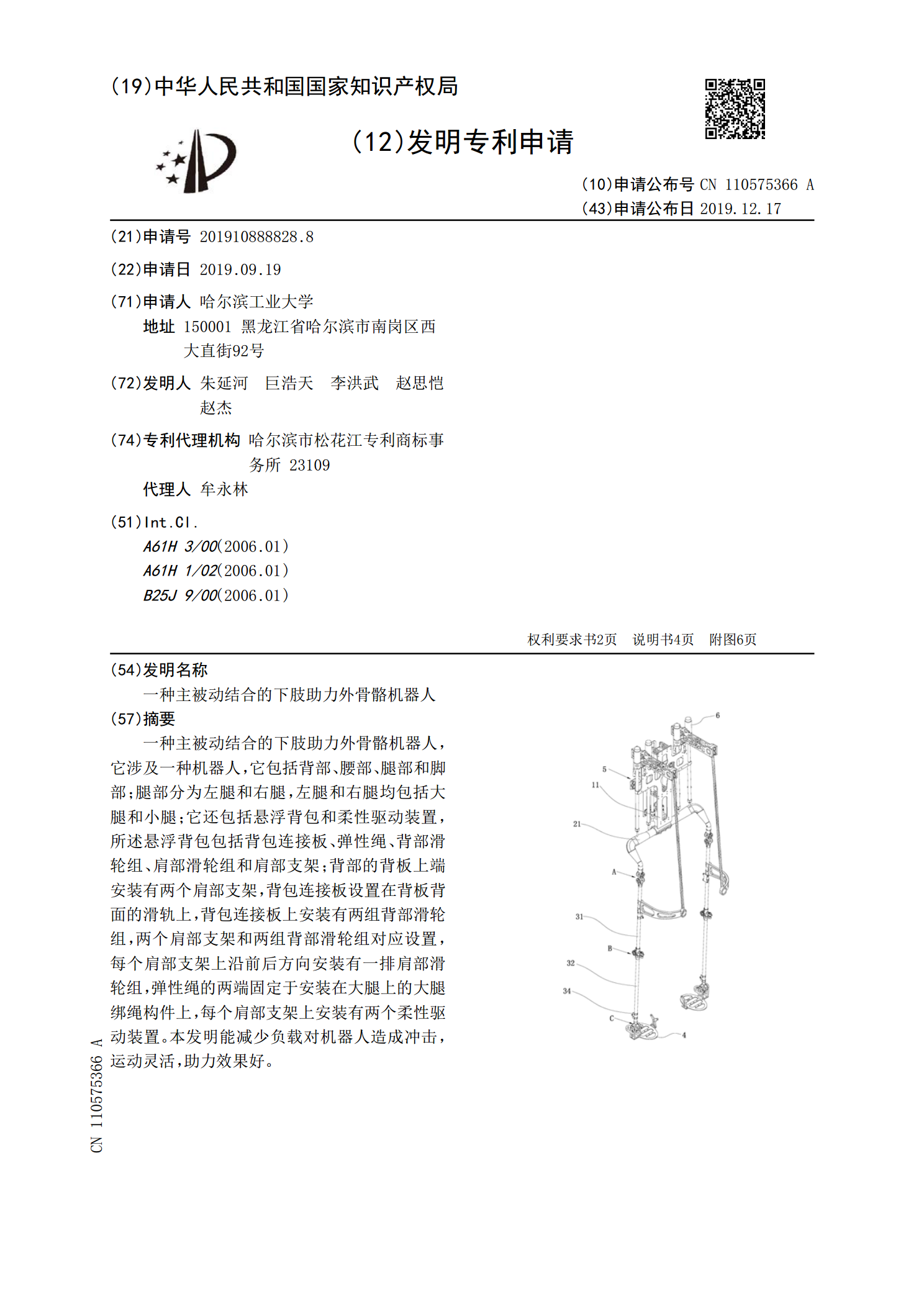
一种主被动结合的下肢助力外骨骼机器人,它涉及一种机器人,它包括背部、腰部、腿部和脚部;腿部分为左腿和右腿,左腿和右腿均包括大腿和小腿;它还包括悬浮背包和柔性驱动装置,所述悬浮背包包括背包连接板、弹性绳、背部滑轮组、肩部滑轮组和肩部支架;背部的背板上端安装有两个肩部支架,背包连接板设置在背板背面的滑轨上,背包连接板上安装有两组背部滑轮组,两个肩部支架和两组背部滑轮组对应设置,每个肩部支架上沿前后方向安装有一排肩部滑轮组,弹性绳的两端固定于安装在大腿上的大腿绑绳构件上,每个肩部支架上安装有两个柔性驱动装置。本
主被动结合的助行下肢外骨骼.pdf
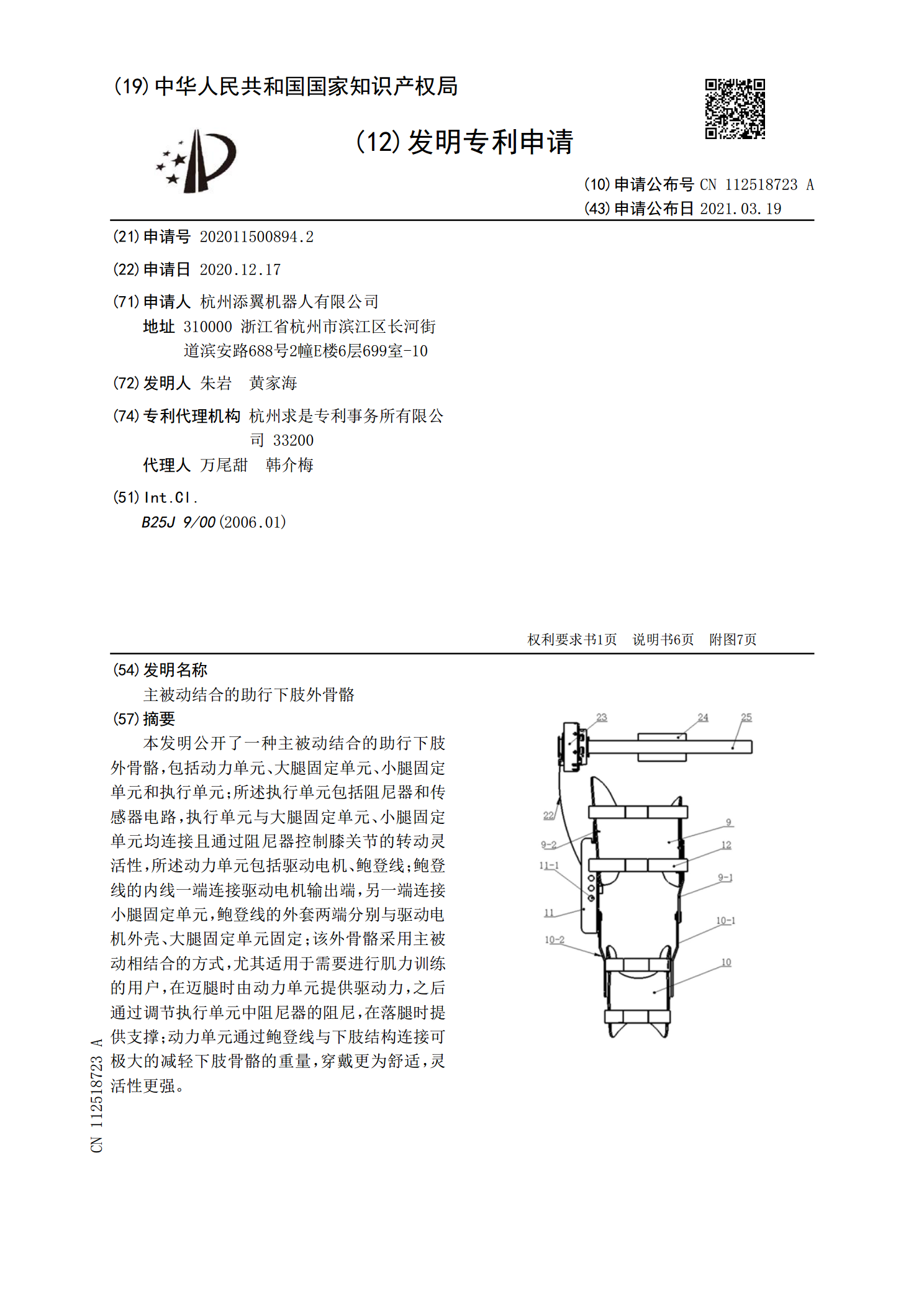
本发明公开了一种主被动结合的助行下肢外骨骼,包括动力单元、大腿固定单元、小腿固定单元和执行单元;所述执行单元包括阻尼器和传感器电路,执行单元与大腿固定单元、小腿固定单元均连接且通过阻尼器控制膝关节的转动灵活性,所述动力单元包括驱动电机、鲍登线;鲍登线的内线一端连接驱动电机输出端,另一端连接小腿固定单元,鲍登线的外套两端分别与驱动电机外壳、大腿固定单元固定;该外骨骼采用主被动相结合的方式,尤其适用于需要进行肌力训练的用户,在迈腿时由动力单元提供驱动力,之后通过调节执行单元中阻尼器的阻尼,在落腿时提供支撑;动
一种轻型化主被动结合的下肢助力外骨骼机器人.pdf
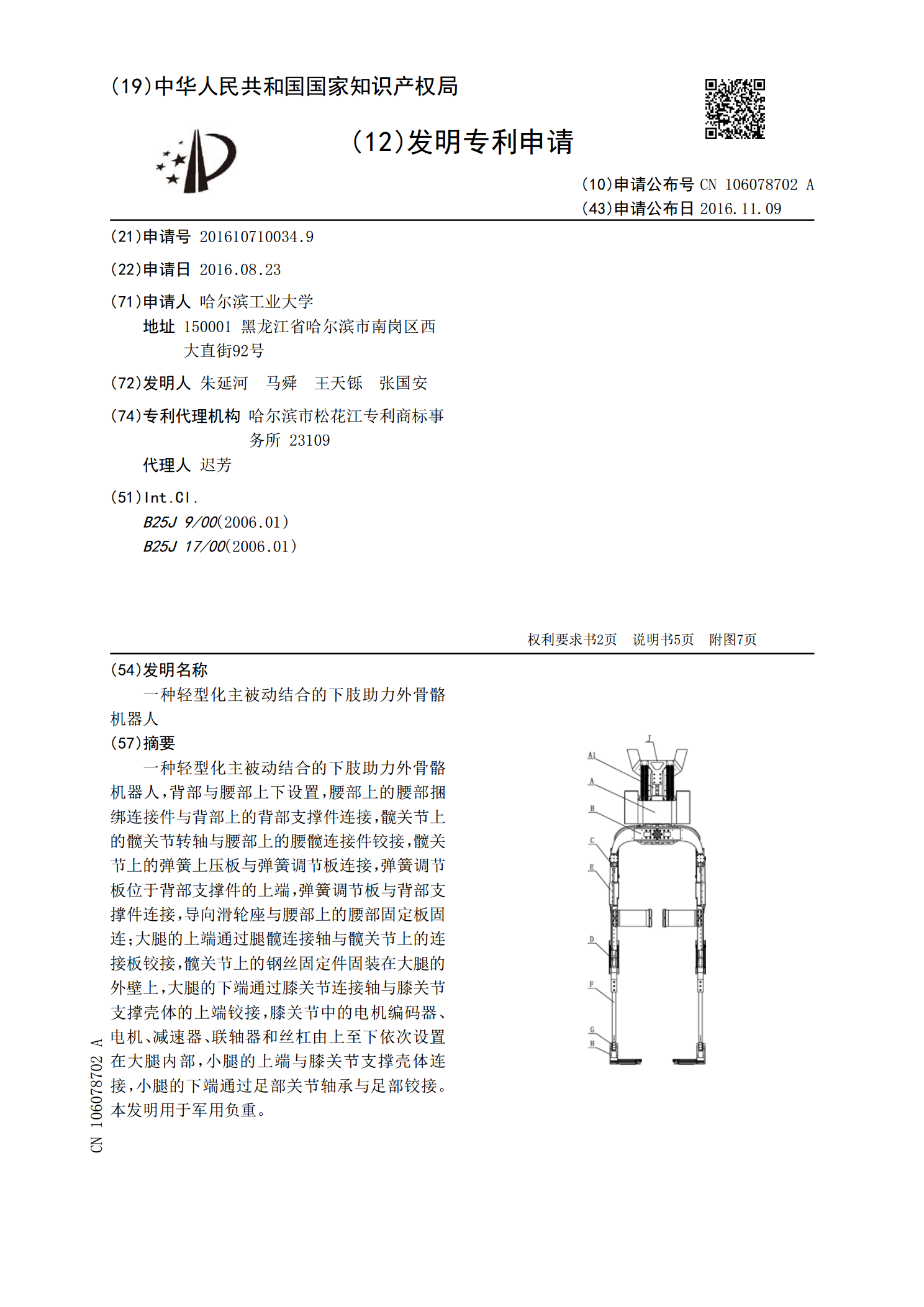
一种轻型化主被动结合的下肢助力外骨骼机器人,背部与腰部上下设置,腰部上的腰部捆绑连接件与背部上的背部支撑件连接,髋关节上的髋关节转轴与腰部上的腰髋连接件铰接,髋关节上的弹簧上压板与弹簧调节板连接,弹簧调节板位于背部支撑件的上端,弹簧调节板与背部支撑件连接,导向滑轮座与腰部上的腰部固定板固连;大腿的上端通过腿髋连接轴与髋关节上的连接板铰接,髋关节上的钢丝固定件固装在大腿的外壁上,大腿的下端通过膝关节连接轴与膝关节支撑壳体的上端铰接,膝关节中的电机编码器、电机、减速器、联轴器和丝杠由上至下依次设置在大腿内部,