
永磁同步电机控制系统仿真模型的建立与实现.docx

猫巷****晓容


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

永磁同步电机控制系统仿真模型的建立与实现.docx
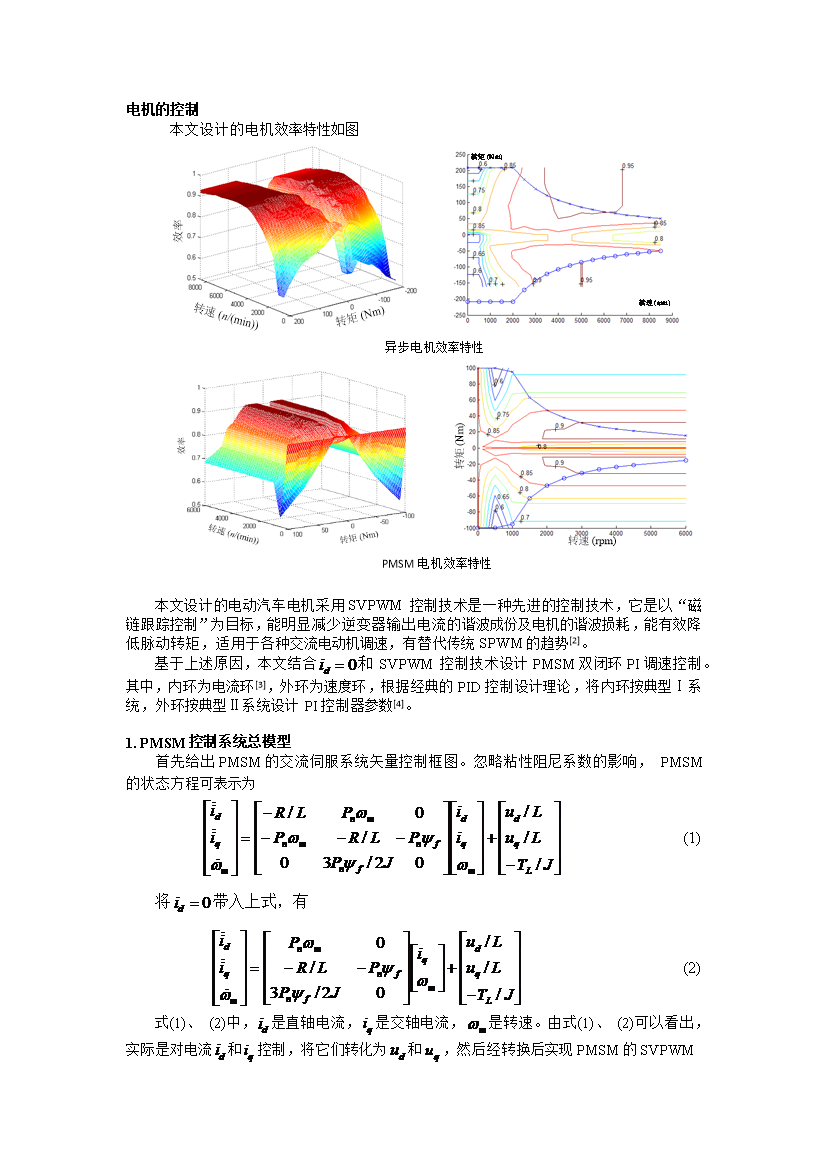
电机的控制本文设计的电机效率特性如图异步电机效率特性PMSM电机效率特性本文设计的电动汽车电机采用SVPWM控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM的趋势[2]。基于上述原因,本文结合和SVPWM控制技术设计PMSM双闭环PI调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI控制器参数[4]。1.P

永磁同步电机控制系统仿真模型的建立与实现.docx
电机的控制本文设计的电机效率特性如图异步电机效率特性PMSM电机效率特性本文设计的电动汽车电机采用SVPWM控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM的趋势[2]。基于上述原因,本文结合和SVPWM控制技术设计PMSM双闭环PI调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI控制器参数[4]。1.P

永磁同步电机控制系统仿真模型的建立与实现.docx
电机的控制本文设计的电机效率特性如图异步电机效率特性PMSM电机效率特性本文设计的电动汽车电机采用SVPWM控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM的趋势[2]。基于上述原因,本文结合和SVPWM控制技术设计PMSM双闭环PI调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI控制器参数[4]。1.P
永磁同步电机控制系统仿真模型的建立与实现.docx
电机的控制本文设计的电机效率特性如图异步电机效率特性PMSM电机效率特性本文设计的电动汽车电机采用SVPWM控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM的趋势[2]。基于上述原因,本文结合和SVPWM控制技术设计PMSM双闭环PI调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI控制器参数[4]。1.P

永磁同步电机的仿真模型.docx
永磁同步电机的仿真模型1、永磁同步电机介绍永磁同步电动机(permanentMagnetssynchronousMotor,PMSM),转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT)的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电