
目标检测基于特征描述子的方法ppt课件.pptx

ca****ng

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标检测基于特征描述子的方法ppt课件.pptx
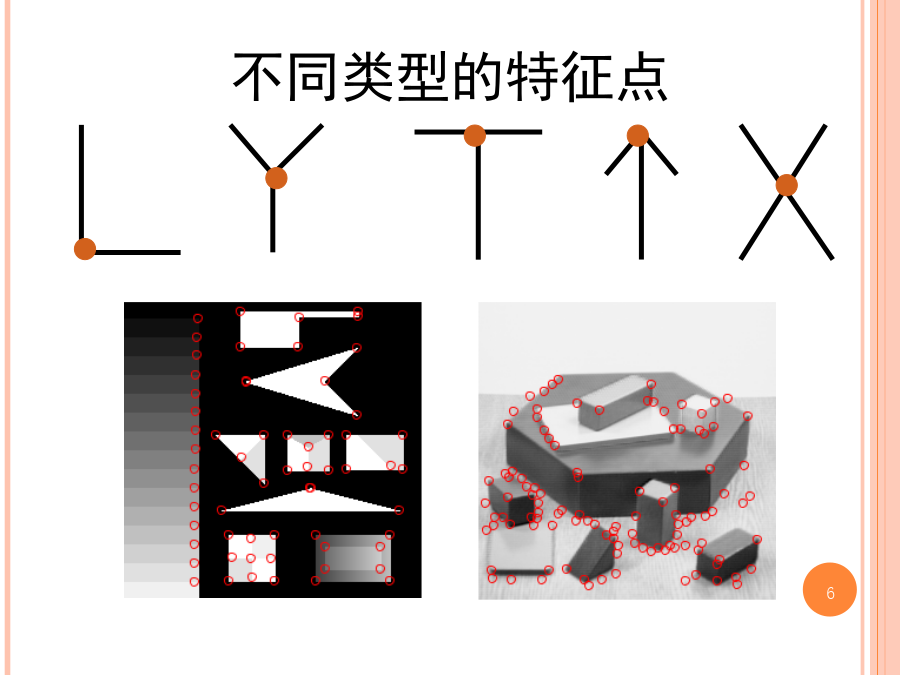
目标检测——基于特征描述子的方法目标检测——基于特征描述子的方法引言图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。对于运动目标,常采用光流等方法提取特征进行匹配,如北航王兆仲等人提出了一种利用光流确定图像运动场的高精度图像匹配算法。对于静态目标,主要采用点匹配方法,即给定同一场景的两幅图像,寻找同一场景点投影到图像中的像素之间的对应关系,主要步骤为图像特征点提取和最小距离计算。不同类型的特征点什么是角

目标检测基于特征描述子的方法.pptx
会计学目标检测——基于特征描述子的方法引言图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。对于运动目标,常采用光流等方法提取特征进行匹配,如北航王兆仲等人提出了一种利用光流确定图像运动场的高精度图像匹配算法。对于静态目标,主要采用点匹配方法,即给定同一场景的两幅图像,寻找同一场景点投影到图像中的像素之间的对应关系,主要步骤为图像特征点提取和最小距离计算。不同类型的特征点什么是角点?引言什么是好的角点检测

5目标检测基于特征描述子的方法.pptx
目标检测——基于特征描述子的方法目标检测——基于特征描述子的方法引言图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。对于运动目标,常采用光流等方法提取特征进行匹配,如北航王兆仲等人提出了一种利用光流确定图像运动场的高精度图像匹配算法。对于静态目标,主要采用点匹配方法,即给定同一场景的两幅图像,寻找同一场景点投影到图像中的像素之间的对应关系,主要步骤为图像特征点提取和最小距离计算。不同类型的特征点什么是角

5目标检测基于特征描述子的方法.pptx
目标检测——基于特征描述子的方法目标检测——基于特征描述子的方法引言图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。图像匹配在众多视觉应用中是一个关键技术,匹配算法直接影响后续视觉处理的效果。对于运动目标,常采用光流等方法提取特征进行匹配,如北航王兆仲等人提出了一种利用光流确定图像运动场的高精度图像匹配算法。对于静态目标,主要采用点匹配方法,即给定同一场景的两幅图像,寻找同一场景点投影到图像中的像素之间的对应关系,主要步骤为图像特征点提取和最小距离计算。不同类型的特征点什么是角

基于全局特征描述子的激光SLAM回环检测方法.docx
基于全局特征描述子的激光SLAM回环检测方法激光SLAM(SimultaneousLocalizationandMapping)是一种使用激光传感器进行环境建图和自主定位的技术。在激光SLAM中,回环检测是一个重要的环节,通过检测到之前出现过的位置,可以提高定位精度和地图一致性。本文介绍一种基于全局特征描述子的激光SLAM回环检测方法。一、激光SLAM基本原理激光SLAM是通过激光传感器扫描环境物体的位置和形状信息,然后根据机器人运动轨迹和激光数据,生成一个二维或三维建图。同时,机器人当前位置和姿态也被计