
电弧炉电极升降控制算法的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电弧炉电极升降控制算法的研究.pptx
电弧炉电极升降控制算法的研究目录添加目录项标题电弧炉电极升降控制算法的背景和意义国内外研究现状和发展趋势研究目的和意义电弧炉电极升降控制算法的基本原理和关键技术电弧炉电极升降控制算法的基本原理电弧炉电极升降控制算法的关键技术电弧炉电极升降控制算法的实现过程和实验结果分析电弧炉电极升降控制算法的实现过程实验结果分析结果与讨论电弧炉电极升降控制算法的优缺点和改进方向电弧炉电极升降控制算法的优点电弧炉电极升降控制算法的缺点改进方向和未来展望结论研究成果总结对未来研究的建议和展望感谢观看

电弧炉电极升降控制算法的研究.docx
电弧炉电极升降控制算法的研究电弧炉电极升降控制算法的研究摘要:电弧炉是目前钢铁冶炼中广泛应用的一种设备,本文将重点研究电弧炉电极升降控制算法,分别介绍经典的PID控制算法、模糊控制算法和神经网络控制算法的原理及实验验证,最后对三种算法进行比较和总结。一、引言电弧炉作为钢铁冶炼中一种重要的设备,在高效、节省能源、节约开支等方面发挥了重要的作用。电弧炉的升降控制在整个钢铁冶炼过程中也扮演着重要的角色。针对电弧炉电极升降控制问题,目前研究较多的是PID控制算法。本文将介绍经典的PID控制算法,比较其与模糊控制算

电弧炉电极升降控制算法的研究的任务书.docx
电弧炉电极升降控制算法的研究的任务书任务书一、任务背景电弧炉是冶金行业中的重要设备,主要用于熔化和精炼高温金属,如钢铁、铜、铝等。电弧炉的炉衬由石墨材料制成,通过电极与熔体之间的放电,将电能转化为热能,把金属熔化。因此,电极的升降控制对电弧炉的工作效率和产品质量具有重要的影响。目前,电弧炉电极的升降控制依靠人工控制,并且操作过程显得较为繁琐,不够智能化。因此,开发一套电极升降控制算法,能够适应各种生产情况,提高设备的自动化程度,具有广泛的应用前景。二、任务目标本任务的主要目标是设计一种高效的电弧炉电极升降

电弧炉电极升降系统建模及控制方法研究.docx
电弧炉电极升降系统建模及控制方法研究电弧炉电极升降系统建模及控制方法研究摘要:电弧炉电极升降系统在电弧炉的工作中起着重要作用。本文通过对电弧炉电极升降系统的建模分析,研究了不同的控制方法,提出了一种有效的控制策略,以提高电弧炉的工作效率和稳定性。实验证明,这种控制方法可以显著提高电弧炉的工作效率和控制精度。关键词:电弧炉,电极升降系统,建模,控制方法,工作效率,稳定性引言:电弧炉是一种常用的冶金设备,广泛应用于钢铁冶炼、炼铁和炼钢等工业领域。电弧炉的工作效率和稳定性对冶金生产过程的控制至关重要。而电弧炉电
电弧炉用电极升降装置.pdf
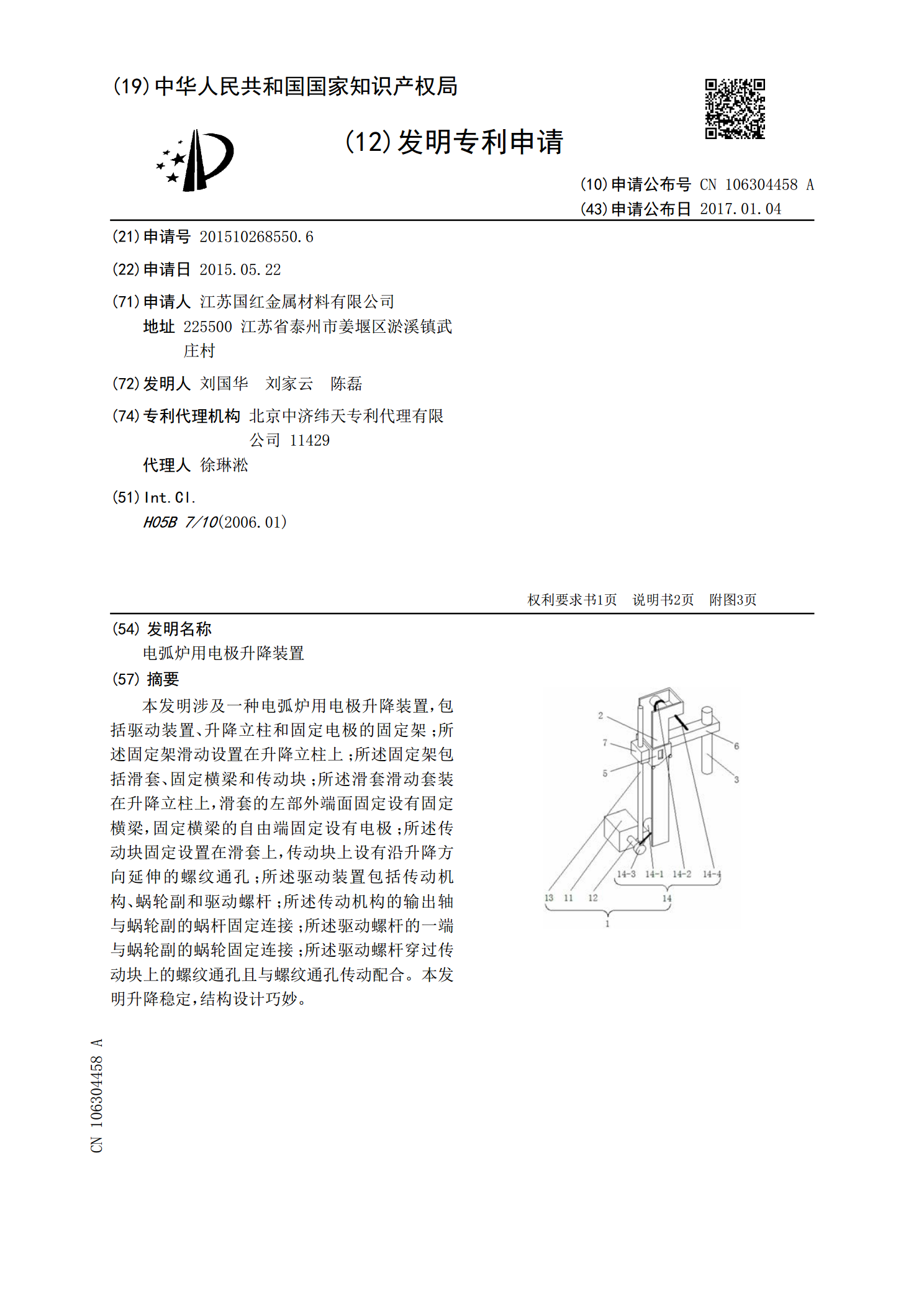
本发明涉及一种电弧炉用电极升降装置,包括驱动装置、升降立柱和固定电极的固定架;所述固定架滑动设置在升降立柱上;所述固定架包括滑套、固定横梁和传动块;所述滑套滑动套装在升降立柱上,滑套的左部外端面固定设有固定横梁,固定横梁的自由端固定设有电极;所述传动块固定设置在滑套上,传动块上设有沿升降方向延伸的螺纹通孔;所述驱动装置包括传动机构、蜗轮副和驱动螺杆;所述传动机构的输出轴与蜗轮副的蜗杆固定连接;所述驱动螺杆的一端与蜗轮副的蜗轮固定连接;所述驱动螺杆穿过传动块上的螺纹通孔且与螺纹通孔传动配合。本发明升降稳定,