
基于GGRRT的机器人自适应栅格地图创建与路径规划研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于GGRRT的机器人自适应栅格地图创建与路径规划研究.docx
基于GGRRT的机器人自适应栅格地图创建与路径规划研究基于GGRRT的机器人自适应栅格地图创建与路径规划研究摘要:随着机器人技术的发展,自主移动机器人在很多领域中得到了广泛应用。而在移动过程中,机器人需要具备地图创建和路径规划能力,以便能够高效地完成任务。本论文针对机器人自适应栅格地图创建与路径规划问题,提出了基于GGRRT算法的解决方案。关键词:机器人、自适应栅格地图、路径规划、GGRRT算法1.引言随着机器人技术的不断发展,自主移动机器人已经广泛应用于各个领域,如智能家居、工业制造、农业等。机器人在进

基于GGRRT的机器人自适应栅格地图创建与路径规划研究的开题报告.docx
基于GGRRT的机器人自适应栅格地图创建与路径规划研究的开题报告一、选题背景随着机器人技术的发展,越来越多的机器人开始被应用于各种领域,如工业制造、陆地勘探、海底搜索等。而在这些应用场景中,机器人需要能够自主感知周围环境,进行路径规划,以达到预定任务的目标。因此,机器人自适应栅格地图创建与路径规划一直是机器人技术研究中的热点问题。机器人自适应栅格地图创建与路径规划的研究不仅能够提高机器人的自主控制能力,还可以将机器人应用于更广泛的领域。在国内外,已经有不少学者开展相关研究,并取得了一些进展,但由于机器人应

基于GGRRT的机器人自适应栅格地图创建与路径规划研究的任务书.docx
基于GGRRT的机器人自适应栅格地图创建与路径规划研究的任务书任务书任务名称:基于GGRRT的机器人自适应栅格地图创建与路径规划研究任务目的:本次任务的目的是研究基于GGRRT算法的机器人自适应栅格地图创建与路径规划,探究该算法在机器人路径规划中的适用性及优越性。该研究可应用于无人机、无人车等机器人领域,提升机器人的自主性和规划性。任务描述:1.研究GGRRT算法的原理与应用研究GGRRT算法的原理及其应用,比较其与其他路径规划算法的优劣势,并说明其在机器人路径规划领域中的适用性。2.实现机器人的自适应栅
基于地图栅格与QPSO算法结合的机器人路径规划方法.pdf
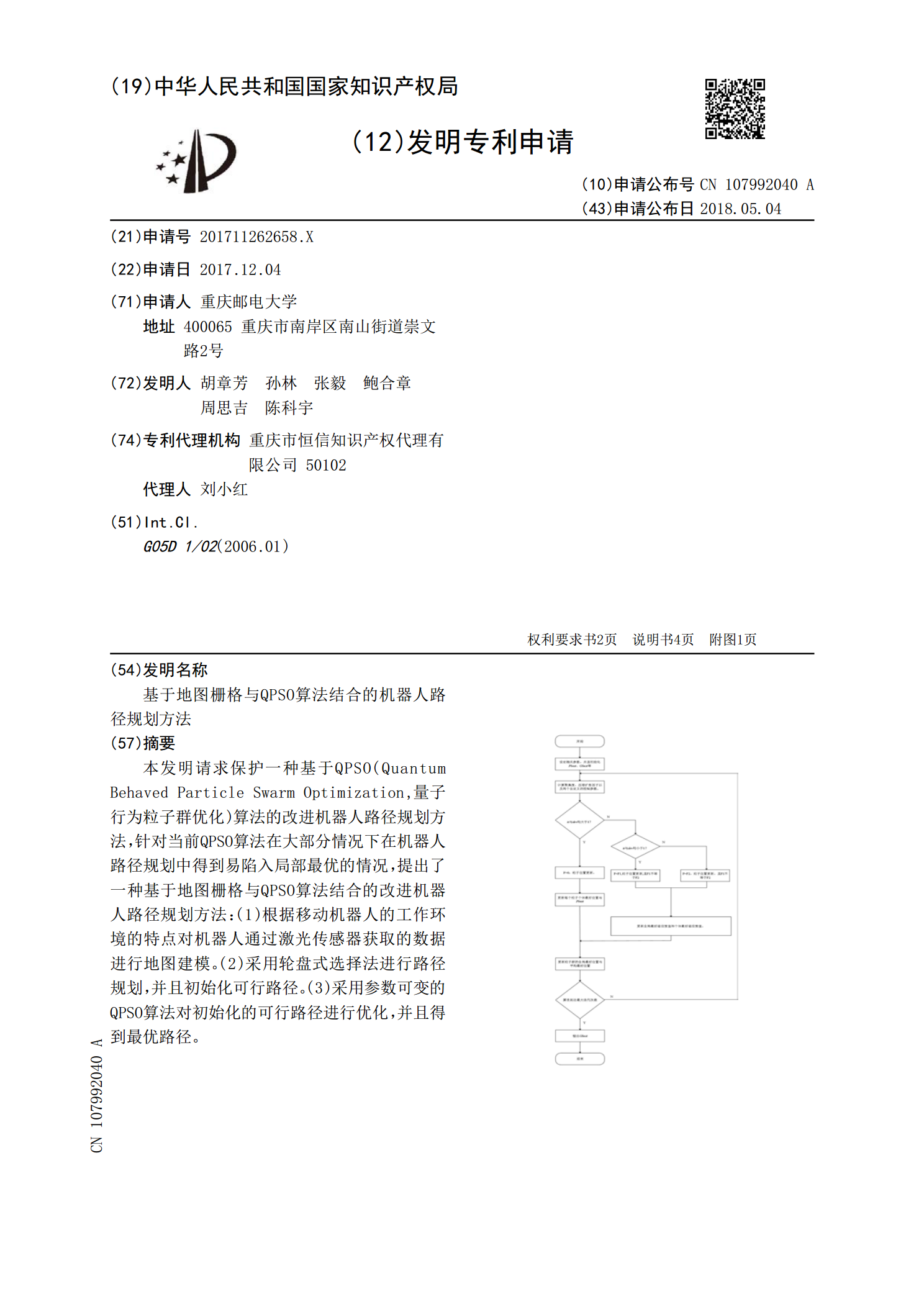
本发明请求保护一种基于QPSO(QuantumBehavedParticleSwarmOptimization,量子行为粒子群优化)算法的改进机器人路径规划方法,针对当前QPSO算法在大部分情况下在机器人路径规划中得到易陷入局部最优的情况,提出了一种基于地图栅格与QPSO算法结合的改进机器人路径规划方法:(1)根据移动机器人的工作环境的特点对机器人通过激光传感器获取的数据进行地图建模。(2)采用轮盘式选择法进行路径规划,并且初始化可行路径。(3)采用参数可变的QPSO算法对初始化的可行路径进行优化

基于栅格地图-蚁群算法的机器人最优路径规划.docx
基于栅格地图-蚁群算法的机器人最优路径规划机器人路径规划是机器人领域中非常重要的任务,它可以使机器人在不确定的环境中找到最优的路径,以达到目标点。机器人路径规划算法有很多种,其中一种基于栅格地图的蚁群算法,可以有效解决机器人路径规划问题。栅格地图是利用二维数组表示三维世界信息的一种方式,其将地图分割成格子,每个格子代表一个单位区域。在栅格地图中,机器人可以沿着行或列移动,因此路径规划问题就转化为给定一个起点和终点,机器人需要选择一条最短路径通过尽可能少的栅格来到达终点。这是一个经典的最短路径问题,传统的最