
基于PID结构的解耦控制器.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于PID结构的解耦控制器.docx
基于PID结构的解耦控制器基于PID结构的解耦控制器摘要:解耦控制是一种用于实现多输入多输出(MIMO)系统的控制策略,通过将系统的输入和输出进行解耦,可以利用单输入单输出(SISO)系统的控制方法来设计和实现复杂的MIMO系统控制。PID(比例-积分-微分)控制器是一种经典的控制器设计方法,具有简单、稳定、易实现等特点。本文将介绍基于PID结构的解耦控制器的原理和设计方法,并通过实例验证其控制效果。关键词:解耦控制器;PID控制器;MIMO系统;控制效果1.引言多输入多输出(MIMO)系统是现代工业控制

基于神经网络的解耦控制器.docx
基于神经网络的解耦控制器基于神经网络的解耦控制器摘要:在控制工程领域中,解耦控制是一种广泛应用的技术,用于解决多输入多输出系统中的交叉耦合问题。传统的解耦控制方法需要对系统进行复杂的数学建模和计算,因此存在一定的局限性。近年来,神经网络在模式识别、控制和优化等领域取得了显著的成果,并显示出在解耦控制中具有巨大的潜力。本文介绍了基于神经网络的解耦控制器的基本原理和方法,并探讨了其在实际应用中的优势和挑战。关键词:解耦控制、神经网络、多输入多输出系统1.引言多输入多输出(MIMO)系统中存在着输入和输出之间的

基于粒子群算法的PID神经网络解耦控制.docx
基于粒子群算法的PID神经网络解耦控制基于粒子群算法的PID神经网络解耦控制摘要:随着工业自动化的快速发展,控制系统在实际应用中面临着越来越多的挑战。这些挑战主要来自于工业过程中的非线性、不确定性以及耦合效应等因素。为了提高控制系统的性能,本论文提出了一种基于粒子群算法的PID神经网络解耦控制方法。该方法使用PID控制算法和神经网络技术相结合,通过采用粒子群算法调节神经网络的权重和偏置参数,实现对多变量耦合系统的解耦控制。实验结果表明,该方法在解耦效果、稳定性和鲁棒性等方面均取得了良好的控制效果,有效提高
基于控制器参数化的渐近跟踪与静态解耦.pdf
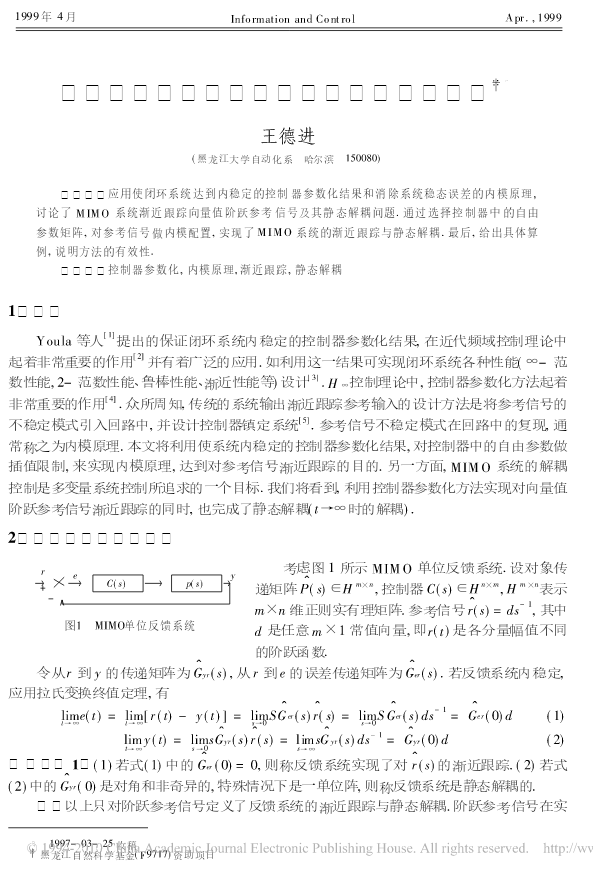
1999年4月InformationandControlApr.,1999基于控制器参数化的渐近跟踪与静态解耦王德进(黑龙江大学自动化系哈尔滨150080)摘要应用使闭环系统达到内稳定的控制器参数化结果和消除系统稳态误差的内模原理,讨论了MIMO系统渐近跟踪向量值阶跃参考信号及其静态解耦问题.通过选择控制器中的自由参数矩阵,对参考信号做内模配置,实现了MIMO系统的渐近跟踪与静态解耦.最后,给出具体算例,说明方法的有效性.关键词控制器参数化,内模原理,渐近跟踪,静态解耦1引言Youla等人[1]提出的

基于并网型VSC解耦模型的控制器参数优化.docx
基于并网型VSC解耦模型的控制器参数优化基于并网型VSC解耦模型的控制器参数优化摘要:随着电力系统规模的不断扩大和复杂化,对电力系统的稳定性和可靠性要求越来越高。而并网型VSC(VoltageSourceConverter)是一种高效、灵活的电力转换技术,它具有容错能力强、控制灵活、响应速度快等优点。然而,为了实现高效的电力转换,对VSC的控制器参数进行优化是非常重要的。本文将基于并网型VSC解耦模型,探讨控制器参数优化的方法。1.引言电力系统是一个复杂的能量传输和分配系统,其中各个组件的运行状态相互关联